

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, GERMANYAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGO, CAEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los vídeos de hoy! Los ingenieros de Columbia construyen Emo, una cara robótica revestida de silicio que establece contacto visual y utiliza dos modelos de IA para anticipar y replicar la sonrisa de una persona antes de que realmente sonría: un avance importante en los robots que predicen con precisión las expresiones faciales humanas, mejoran las interacciones y generan confianza entre humanos y robots.[ Columbia ]Investigadores de la Universidad de Stanford han inventado una forma de aumentar los motores eléctricos para hacerlos mucho más eficientes a la hora de realizar movimientos dinámicos a través de un nuevo tipo de actuador, un dispositivo que utiliza energía para hacer que las cosas se muevan. Su actuador, publicado el 20 de marzo en Science Robotics, utiliza resortes y embragues para realizar una variedad de tareas con una fracción del uso de energía de un motor eléctrico típico.[ Stanford ]Lo siento, pero el mundo no necesita más bateristas.[ Fourier Intelligence ]Siempre es bueno ver a Valakyrie de la NASA realizando investigaciones.[ NASA ]En terrenos desafiantes, la construcción de estructuras como antenas y mástiles de teleféricos a menudo requiere el uso de helicópteros para transportar cargas mediante cuerdas. Desafiando este paradigma, presentamos Geranos: un vehículo aéreo no tripulado (UAV) multirotor especializado diseñado para mejorar el transporte y el ensamblaje aéreos. . Nuestra demostración experimental que imita las instalaciones de mástiles de antenas/teleféricos muestra la capacidad de Gerano para apilar postes (3 kilogramos, 2 metros de largo) con una notable precisión de colocación inferior a 5 centímetros, sin necesidad de intervención manual humana.[ Paper ]Elios 2 de Flyability en noviembre de 2020 ayudó a los investigadores a inspeccionar el reactor 5 en el lugar del desastre nuclear de Chernobyl para determinar si había uranio presente en el área. Hasta entonces, el reactor 5 no había sido investigado desde el desastre de 1986.[ Flyability ]Hasta ahora se han desarrollado varios humanoides musculoesqueléticos. Si bien estos humanoides tienen la ventaja de sus cuerpos flexibles y redundantes que imitan el cuerpo humano, todavía están lejos de ser aplicados a tareas del mundo real. Una de las razones de esto es la dificultad de caminar bípedo en un cuerpo flexible. Por lo tanto, desarrollamos un robot musculoesquelético con ruedas, Musashi-W, combinando una base con ruedas y extremidades superiores musculoesqueléticas para aplicaciones del mundo real.[ Paper ]¡Gracias, Kento! Una tendencia reciente en robótica industrial es tener manipuladores robóticos trabajando lado a lado con operadores humanos. Un aspecto desafiante de esta coexistencia es que se requiere que el robot resuelva de manera confiable problemas complejos de planificación de rutas en un entorno que cambia dinámicamente. Para garantizar la seguridad del operador humano y al mismo tiempo lograr la realización eficiente de la tarea, este documento presenta… un esquema [that] puede dirigir el brazo del robot a la postura de efector final deseada en presencia de saturación del actuador, rangos articulares limitados, límites de velocidad, un entorno de obstáculos estáticos desordenado y colaboradores humanos en movimiento.[ Paper ]¡Gracias, Kelly! Nuestro manipulador móvil Digit trabajó de forma continua durante 26 horas divididas en los 3,5 días de Modex 2024, en Atlanta. Todo fue rastreado y coordinado por nuestro producto más nuevo, Agility Arc, una plataforma de automatización en la nube.[ Agility ]Estamos construyendo robots que pueden mantener a las personas fuera de peligro: Spot permite a los operadores investigar y reducir situaciones peligrosas de forma remota. Los robots se han utilizado en aplicaciones gubernamentales y de seguridad pública durante décadas, pero la movilidad inigualable y la interfaz intuitiva de Spot están cambiando la respuesta a incidentes de los departamentos en el campo hoy en día.[ Boston Dynamics ]Este artículo presenta un robot transformador aéreo biestable (BAT), un novedoso vehículo aéreo híbrido (HAV) transformable que cambia entre los modos cuadrotor y ala fija mediante una rápida aceleración y sin ninguna actuación adicional más allá de las necesarias para el vuelo normal.[ Paper ]Baymax de Disney suele ser el centro de atención en muchas presentaciones de investigación dedicadas a la interacción física humano-robot (pHRI) suave y segura. El reciente artículo de KIMLAB en TRO muestra un paso hacia la realización del concepto Baymax al envolver los esqueletos de PAPRAS (Sistema de brazo robótico Plug And Play) con pieles suaves y utilizarlas para funciones sensoriales.[ Paper ]Atrápame si puedes![ CVUT ]El aprendizaje por refuerzo profundo (RL) ha demostrado resultados impresionantes en la resolución de tareas robóticas complejas, como la locomoción cuadrúpeda. Sin embargo, los solucionadores actuales no logran producir políticas eficientes que respeten restricciones estrictas. En este trabajo, abogamos por la integración de restricciones en el aprendizaje de robots y presentamos Restricciones como terminaciones (CaT), un novedoso algoritmo de RL restringido.[ CaT ]¿Por qué el sueño de tener un robot en casa que haga tus tareas aún no se ha hecho realidad? Con tres décadas de experiencia en investigación en este campo, el robótico Ken Goldberg arroja luz sobre la cruda verdad sobre los robots y lo que se necesitará para construir máquinas más diestras para trabajar en un almacén o ayudar en casa.[ TED ]Diseñado como una demostración de tecnología que permitiría realizar hasta cinco vuelos de prueba experimentales en un lapso de 30 días, el helicóptero de Marte superó las expectativas (repetidamente) y recientemente completó su misión después de haber registrado la increíble cantidad de 72 vuelos durante casi tres años. Únase a nosotros para una charla en vivo para aprender cómo el equipo de Ingenuity utilizó el ingenio y la creatividad para transformar el helicóptero de una demostración tecnológica exitosa en un útil explorador para el rover Perseverance, demostrando en última instancia el valor de la exploración aérea para futuras misiones interplanetarias.[ JPL ]Únase a nosotros para una animada mesa redonda con los miembros de la facultad GRASP, el Dr. Pratik Chaudhari, el Dr. Dinesh Jayaraman y el Dr. Michael Posa. Este panel será moderado por el Dr. Kostas Daniilidis en torno al tema candente actual de la IA incorporada en la robótica.[ Penn Engineering ]
Source link
Etiqueta: drones

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSDisfrute de los videos de hoy !Vea el viaje de NVIDIA desde ser pionero en hardware avanzado para vehículos autónomos y herramientas de simulación hasta percepción y manipulación aceleradas para robots móviles autónomos y brazos industriales, culminando en la próxima ola de IA de vanguardia para robots humanoides.[ NVIDIA ]En la versión 4.0, mejoramos las habilidades de locomoción de Spot gracias al poder del aprendizaje por refuerzo. Paul Domanico, ingeniero en robótica de Boston Dynamics, habla de cómo el enfoque híbrido de Spot de combinar el aprendizaje por refuerzo con el control predictivo del modelo crea un robot aún más estable en los entornos más antagónicos.[ Boston Dynamics ]Estamos entusiasmados de compartir nuestro último progreso en la enseñanza de habilidades de propósito general a los EVE. Todo en el video es autónomo, todo a velocidad 1X, todo controlado con un único conjunto de pesos de red neuronal.[ 1X ]Lo que encuentro interesante acerca de que el Unitree H1 haga un giro de pie es dónde decide poner sus piernas.[ Unitree ]En la Exposición MODEX de marzo de 2024, Pickle Robot demostró cómo recoger carga de una pila aleatoria similar a lo que se ve en un remolque de camión desordenado después de haber rebotado durante muchos kilómetros de carretera. Las pilas de cajas nunca volvieron a ser las mismas y la manifestación se realizó en vivo frente a una multitud de espectadores 25 veces durante 4 días. Ningún otro sistema robótico de descarga de contenedores o remolques ha demostrado todavía esta capacidad de recoger pilas no estructuradas.[ Pickle ]RunRu es un robot parecido a un coche, un coche parecido a un robot, con autonomía, sociabilidad y operatividad. Se trata de un nuevo tipo de vehículo personal que pretende crear una relación “Jinba-Ittai” con sus pasajeros, que no sólo son siempre asertivos, sino que a veces también se quejan.[ ICD-LAB ]Verdie fue al GTC este año y se ganó el corazón de la gente, pero tal vez no el de los otros robots.[ Electric Sheep ]“DEEPRobotics AI+” combina capacidades de IA con sistemas de software robóticos para impulsar continuamente la inteligencia incorporada. El logro mostrado es el resultado del entrenamiento de un nuevo sistema de software e inteligencia artificial.[ DEEP Robotics ]Si desea recopilar datos para el agarre del robot, usar Stretch y un par de pinzas es lo más asequible posible.[ Hello Robot ]La verdadera razón por la que las piernas de Digit miran hacia atrás es para que no se golpee las espinillas al sacar las GPU del horno. Mientras tanto, algunos de nosotros podemos hornear nuestras GPU sin siquiera necesitar un horno.[ Agility ]P1 es el innovador robot bípedo de pie puntiagudo de LimX Dynamics, que sirve como una plataforma importante para el desarrollo sistemático y las pruebas modulares del aprendizaje por refuerzo. Se utiliza para avanzar en la investigación y la iteración de las habilidades básicas de locomoción bípeda. El éxito de P1 en la conquista del terreno forestal es un testimonio de la investigación y el desarrollo sistemático de LimX Dynamics en el aprendizaje por refuerzo.[ LimX ]Y ahora, esto.[ Suzumori Endo Lab ]Cocinar en las cocinas es divertido. ¡PERO hacerlo en colaboración con dos robots es aún más satisfactorio! Presentamos MOSAIC, un marco modular que coordina múltiples robots para colaborar estrechamente y cocinar con los humanos a través de la interacción del lenguaje natural y un depósito de habilidades.[ Cornell ]neoDavid es un humanoide robusto con diestras habilidades de manipulación, desarrollado en DLR. El objetivo principal en el desarrollo de neoDavid es acercarse lo más posible a las capacidades humanas, especialmente en términos de dinámica, destreza y robustez.[ DLR ]Bienvenido a nuestra serie de videos destacados para clientes donde mostramos algunos de los robots notables en los que nuestros clientes han estado trabajando. En este episodio, mostramos tres UGV de Clearpath Robotics que nuestros clientes utilizan para crear asistentes robóticos para tres aplicaciones diferentes.[ Clearpath ]Este vídeo presenta la nueva mano robótica de tres dedos de KIMLAB, que cuenta con sensores táctiles suaves para mejorar las capacidades de agarre. Aprovechando materiales de impresión 3D rentables, garantiza robustez y eficiencia operativa.[ KIMLAB ]Varios enfoques de planificación conscientes de la percepción han intentado mejorar la precisión de la estimación del estado durante las maniobras, mientras que a menudo se ha pasado por alto la compatibilidad de características entre marcos, un factor crucial que influye en la precisión de la estimación. En este artículo, presentamos APACE, un marco de generación de trayectorias ágil y consciente de la percepción para vuelos agresivos con quadrotores, que tiene en cuenta la compatibilidad de características durante la planificación de trayectorias.[ Paper ] a través de [ HKUST ]En este vídeo, vemos a Samuel Kunz, el piloto del equipo RSL Assistance Robot Race de ETH Zurich, mientras participa en los CYBATHLON Challenges 2024. Samuel completó las cuatro tareas designadas: recuperar un paquete de un buzón, usar un cepillo de dientes, colgar una bufanda en un tendedero y vaciar un lavavajillas, con la ayuda de un robot asistente. Logró una puntuación perfecta de 40 sobre 40 puntos y consiguió el primer puesto en la carrera, completando las tareas en 6,34 minutos.[ CYBATHLON ]Florian Ledoux es un fotógrafo de vida silvestre con un profundo amor por el Ártico y su vida silvestre. Usando el Mavic 3 Pro, pisa el hielo listo para capturar la belleza pura y las historias de este lugar frío y remoto.[ DJI ]
Source link
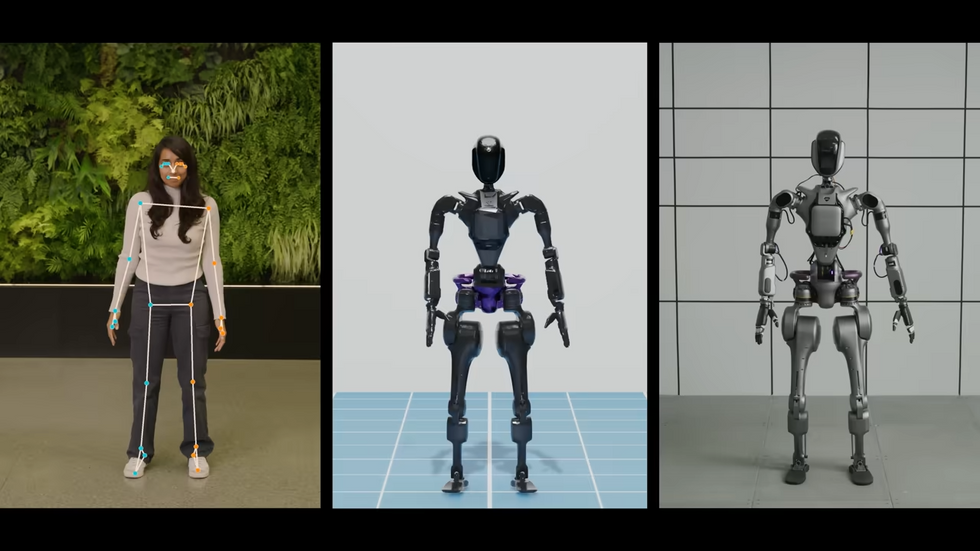
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfrute de los videos de hoy! Presentamos Human to Humanoid (H2O), un marco basado en aprendizaje por refuerzo (RL) que permite la teleoperación de todo el cuerpo en tiempo real de un robot humanoide de tamaño completo con solo una cámara RGB. Logramos con éxito la teleoperación de movimientos dinámicos de todo el cuerpo en escenarios del mundo real, incluidos caminar, saltar hacia atrás, patear, girar, saludar, empujar, boxear, etc. Hasta donde sabemos, esta es la primera demostración para lograr el aprendizaje. -Teleoperación humanoide de cuerpo entero en tiempo real.[ CMU ]Los robots con patas tienen el potencial de atravesar terrenos complejos y acceder a espacios reducidos más allá del alcance de las plataformas tradicionales gracias a su capacidad para seleccionar cuidadosamente puntos de apoyo y adaptar de manera flexible su postura corporal mientras caminan. Sin embargo, la implementación sólida en aplicaciones del mundo real sigue siendo un desafío abierto. En este artículo, presentamos un método para el control de la locomoción de las piernas utilizando aprendizaje por refuerzo y representaciones volumétricas 3D para permitir una locomoción robusta y versátil en entornos confinados y no estructurados.[ Takahiro Miki ]Claro, 3,3 metros por segundo es rápido para un humanoide, pero estoy más impresionado por los giros mientras camino escaleras abajo.[ Unitree ]Mejorar la seguridad de los manipuladores colaborativos requiere la reducción de la inercia en la parte móvil. Introducimos un enfoque novedoso en forma de un alineador de alambre 3D pasivo, que sirve como un mecanismo de transmisión de potencia liviano y de baja fricción, logrando así la baja inercia deseada en la operación del manipulador.[ SAQIEL ]Gracias, Temma!Robot Era acaba de lanzar Humanoid-Gym, un marco de aprendizaje por refuerzo de código abierto para humanoides bípedos. Como se puede ver en el vídeo, los algoritmos RL le han dado al robot, llamado Xiao Xing, o XBot, la capacidad de subir y bajar cajas apiladas al azar con relativa estabilidad y facilidad.[ Robot Era ]»Captura bimanual consciente del impacto de objetos de gran impulso». ¿Necesito decir mas?[ SLMC ]Más del 80% de los supervivientes de un accidente cerebrovascular experimentan dificultades para caminar, lo que afecta significativamente su vida diaria, su independencia y su calidad de vida en general. Ahora, una nueva investigación de la Universidad de Massachusetts Amherst amplía los límites de la recuperación de un accidente cerebrovascular con un exoesqueleto robótico de cadera único, diseñado como una herramienta de entrenamiento para mejorar la función de caminar. Esto invita a la posibilidad de nuevas terapias que sean más accesibles y más fáciles de trasladar de la práctica a la vida diaria, en comparación con los métodos de rehabilitación actuales.[ UMass Amherst ]¡Gracias, Julia! La manipulación aquí es bastante impresionante, pero es difícil saber qué tan impresionante sin saber también cuánto se aceleró el video.[ Somatic ]Los drones DJI trabajan para hacer del mundo un lugar mejor y una de las formas en que lo hacemos es a través del trabajo de conservación. Nos asociamos con Halo Robotics y OFI Orangutan Foundation International para mostrar cómo estos drones pueden generar un impacto.[ DJI ]El objetivo de la prueba es demostrar la extracción y sustitución de módulos satelitales en un formato CubeSat 27U utilizando el control de realidad aumentada de un robot. En este caso de uso, el satélite «cliente» se actualiza y reabastece de combustible utilizando componentes modulares. Luego, el robot retirará el módulo de computadora defectuoso y lo colocará en un dispositivo. Luego hará lo mismo con el tanque de propulsor. Luego, el robot los colocará correctamente nuevamente en el satélite.[ Extend Robotics ]Este video presenta algunos de los momentos más destacados y favoritos de los CYBATHLON Challenges 2024 que tuvieron lugar el 2 de febrero, mostrando tantos tipos diversos de tecnología de asistencia asumiendo tareas de disciplina y mostrando la tenacidad y determinación de los pilotos. Los Desafíos vieron nuevos equipos, nuevas tareas y nuevos formatos para muchas de las disciplinas de CYBATHLON.[ Cybathlon ]Ha sido un largo camino hacia los robots propulsados eléctricamente.[ ABB ]Pequeños drones para incendios forestales catastróficos (que cubren más de [40,470 hectares]) son como llevar una linterna para iluminar un campo de fútbol. Este breve vídeo describe los principales usos de los drones de todos los tamaños y por qué y cuándo se utilizan, o por qué no.[ CRASAR ]Probablemente no le sorprenda que haya muchos robots involucrados en la construcción de camiones y furgonetas Rivian.[ Kawasaki Robotics ]El programa Learning Introspective Control (LINC) de DARPA está desarrollando métodos de aprendizaje automático que son prometedores para acercar ese escenario a la realidad. LINC tiene como objetivo mejorar fundamentalmente la seguridad de los sistemas mecánicos, específicamente en vehículos terrestres, barcos, enjambres de drones y robótica, utilizando varios métodos que requieren una potencia informática mínima. El resultado es un controlador impulsado por IA del tamaño de un teléfono móvil.[ DARPA ]
Source link

Es sorprendente cómo los cuadrotores han escalado durante la última década. Ahora estamos en el punto en el que están al borde de lo desechable, al menos desde una perspectiva comercial o de investigación: por un poco más de 200 dólares, puedes comprar un pequeño dron de 27 gramos, de código abierto, y todo lo que tienes que hacer es enseñarle a volar. Sin embargo, ahí es donde las cosas se vuelven un poco más desafiantes, porque enseñar a volar a los drones no es un proceso sencillo. Gracias a una buena simulación y a técnicas como el aprendizaje por refuerzo, es mucho más fácil dotar de autonomía a los drones que antes. Pero no suele ser un proceso rápido y puede resultar complicado realizar una transición fluida de la simulación a la realidad. El Laboratorio de Percepción y Robótica Ágil de la Universidad de Nueva York ha logrado agilizar y simplificar mucho el proceso de conseguir autonomía básica para trabajar en drones: el sistema del laboratorio es capaz de entrenar un dron en simulación desde cero hasta un vuelo estable y controlable. 18 segundos planos en una MacBook Pro. Y, en realidad, lleva más tiempo compilar y actualizar el firmware en el dron que todo el proceso de entrenamiento. ARPL NYU Entonces, el dron no solo es capaz de mantener un vuelo estacionario estable mientras rechaza golpes, empujones y viento, sino que también es capaz de volar trayectorias específicas. Nada mal durante 18 segundos, ¿verdad? Una de las cosas que normalmente ralentiza los tiempos de entrenamiento es la necesidad de seguir refinando exactamente para qué estás entrenando, sin refinarlo tanto que solo estés entrenando tu sistema para volar en tu simulación específica en lugar del mundo real. La estrategia utilizada aquí es lo que los investigadores llaman un plan de estudios (también se puede considerar como una especie de plan de lección) para ajustar la función de recompensa utilizada para entrenar el sistema mediante el aprendizaje por refuerzo. El plan de estudios comienza siendo más indulgente y aumenta gradualmente las sanciones para enfatizar la solidez y la confiabilidad. Se trata de eficiencia: hacer el entrenamiento que necesitas hacer de la manera que debe hacerse para obtener los resultados que deseas, y nada más. Hay otros trucos más sencillos que también optimizan esta técnica para aumentar la velocidad. Los algoritmos de aprendizaje por refuerzo profundo son particularmente eficientes y aprovechan la aceleración de hardware que viene con los procesadores de la serie M de Apple. La eficiencia del simulador multiplica los beneficios de la eficiencia de muestra impulsada por el plan de estudios del proceso de aprendizaje por refuerzo, lo que lleva a ese tiempo de capacitación increíblemente rápido. Este enfoque no se limita a simples drones diminutos: funcionará en prácticamente cualquier drone, incluidos los más grandes y caros, o incluso uno que usted mismo construya desde cero. Jonas Eschmann En el vídeo de arriba se nos dice que se necesitaron minutos en lugar de segundos para entrenar una política para el dron, aunque los investigadores esperan que se puedan lograr 18 segundos incluso para un dron más complejo como este en un futuro cercano. Y todo es de código abierto, por lo que, de hecho, puedes construir un dron y enseñarle a volar con este sistema. Pero si espera un poco, las cosas solo mejorarán: los investigadores nos dicen que están trabajando en la integración con el piloto automático del dron de código abierto PX4. A más largo plazo, la idea es tener una política única que pueda adaptarse a diferentes condiciones ambientales, así como a diferentes configuraciones de vehículos, lo que significa que podría funcionar con todo tipo de robots voladores en lugar de solo cuadrotores. Todo lo que necesita para ejecutar esto usted mismo está disponible en GitHub, y el documento está en ArXiv aquí. Desde su sitio Artículos Artículos relacionados en la Web