

Es difícil pensar en una forma más dramática de hacer una entrada que caer del cielo. Si bien esto sucede con bastante frecuencia en la pantalla grande, si se puede hacer o no en la vida real es un desafío tentador para nuestro equipo de robótica de entretenimiento en Disney Research. Caer es complicado por dos razones. El primero y más obvio es lo que Douglas Adams llamó “la parada repentina al final”. Cada segundo de caída libre significa otros 9,8 m/s de velocidad, y eso puede convertirse rápidamente en un problema de disipación de energía extremadamente difícil. El otro aspecto complicado de las caídas, especialmente para los animales terrestres como nosotros, es que nuestros métodos normales para controlar nuestra orientación desaparecen. Estamos acostumbrados a depender de las fuerzas de contacto entre nuestro cuerpo y el entorno para controlar hacia dónde apuntamos. ¡En el aire no hay nada que impulsar excepto el aire mismo! Encontrar una solución a estos problemas es un gran desafío indefinido. En el clip a continuación, puede ver un enfoque que hemos adoptado para comenzar a desmenuzarlo. El video muestra un pequeño robot con forma de palo con una serie de cuatro ventiladores con conductos conectados a su parte superior. El robot tiene un pie en forma de pistón que absorbe el impacto de una pequeña caída, y luego los ventiladores con conductos mantienen al robot en pie contrarrestando cualquier movimiento de inclinación mediante un empuje aerodinámico.Raphael Pilon [left] y Marcela de los Ríos evalúan el rendimiento del robot de equilibrio monopié. Disney Research La parte de pie demuestra que empujar en el aire no sólo es útil durante la caída libre. Los robots convencionales que caminan y saltan dependen de las fuerzas de contacto con el suelo para mantener la orientación requerida. Estas fuerzas pueden aumentar rápidamente debido a la rigidez del sistema, lo que requiere estrategias de control de gran ancho de banda. Las fuerzas aerodinámicas son relativamente suaves, pero aun así fueron suficientes para mantener a nuestros robots en pie. Y dado que estas fuerzas también se pueden aplicar durante la fase de vuelo al correr o saltar, este enfoque podría llevar a robots que corran antes de caminar. Lo que define la marcha al correr es la existencia de una “fase de vuelo”, un momento en el que ninguno de los pies está en contacto con el suelo. Un robot en carrera con autoridad de control aerodinámico podría potencialmente utilizar un modo de andar con una fase de vuelo larga. Esto trasladaría la carga del esfuerzo de control a pleno vuelo, simplificando el diseño de las piernas y posiblemente haciendo que el movimiento bípedo rápido sea más manejable que un ritmo moderado. Richard Landon utiliza un banco de pruebas para evaluar el perfil de empuje de un ventilador con conductos. En el siguiente vídeo, un robot un poco más grande se enfrenta a una caída mucho más dramática, desde 65 pies en el aire. Esta sencilla máquina tiene dos pies en forma de pistón y una serie similar de ventiladores con conductos en la parte superior. Los ventiladores no sólo estabilizan el robot al aterrizar, sino que también ayudan a mantenerlo orientado correctamente mientras cae. Dentro de cada pie hay un tapón de espuma comprimible de un solo uso. Aplastar la espuma en el impacto proporciona un perfil de fuerza agradable y constante, que maximiza la cantidad de energía disipada por pulgada de contracción. En el caso de este pequeño robot, la disipación de energía mecánica en los pistones es menor que la energía total necesaria para ser disipada. de la caída, por lo que el resto del mecanismo sufre un golpe bastante fuerte. El tamaño del robot es una ventaja en este caso, porque las leyes de escala significan que la relación fuerza-peso está a su favor. La resistencia de un componente es función de su área de sección transversal, mientras que el peso de un componente es función de su volumen. El área es proporcional a la longitud al cuadrado, mientras que el volumen es proporcional a la longitud al cubo. Esto significa que a medida que un objeto se hace más pequeño, su peso se vuelve relativamente pequeño. Esta es la razón por la que un niño pequeño puede medir la mitad de la altura de un adulto, pero sólo una fracción del peso de ese adulto, y por la que las hormigas y las arañas pueden correr con patas largas y delgadas. Nuestros pequeños robots aprovechan esto, pero no podemos detenernos ahí si queremos representar algunos de nuestros personajes más importantes. Louis Lambie y Michael Lynch ensamblan una de las primeras plataformas de prueba para fanáticos. La plataforma se montó sobre guías y se utilizó para pruebas de capacidad de elevación. Disney Research En la mayoría de las aplicaciones de robótica aérea, el control lo proporciona un sistema que es capaz de soportar todo el peso del robot. En nuestro caso, poder flotar no es una necesidad. El siguiente clip muestra una investigación sobre cuánto empuje se necesita para controlar la orientación de un robot bastante grande y pesado. El robot se apoya en un cardán, lo que le permite girar libremente. En los extremos se encuentran montados conjuntos de ventiladores con conductos. Los ventiladores no tienen suficiente fuerza para mantener el marco en el aire, pero sí tienen mucha autoridad de control sobre la orientación. Los robots complicados tienen menos probabilidades de sobrevivir ilesos cuando se los somete a aceleraciones extremadamente altas de un impacto directo contra el suelo. como puede ver en esta prueba inicial que no salió según lo planeado. En este último video, utilizamos una combinación de las técnicas anteriores y agregamos una capacidad más: una espectacular parada en el aire. Los ventiladores con conductos son parte de esta solución, pero la desaceleración a alta velocidad se logra principalmente mediante un gran cohete de agua. Luego, las patas mecánicas solo tienen que manejar los últimos tres metros de caída de aceleración. Ya sea que use agua o combustible para cohetes, el principio subyacente de un cohete es el mismo: la masa es expulsada del cohete a alta velocidad, produciendo una fuerza de reacción en sentido opuesto. dirección a través de la tercera ley de Newton. Cuanto mayor es el caudal y más denso es el fluido, más fuerza se produce. Para obtener un caudal alto y un tiempo de respuesta rápido, necesitábamos una boquilla ancha que pasara de cerrada a abierta limpiamente en cuestión de milisegundos. Diseñamos un sistema utilizando un trozo de lámina de cobre y un mecanismo de perforación personalizado que logró precisamente eso. Grant Imahara presuriza un tanque de prueba para evaluar un prototipo de válvula inicial. [left]. El cohete de agua en acción: observe el flujo laminar de dos pulgadas de ancho cuando pasa a través de la boquilla especialmente diseñadaDisney ResearchUna vez que el cohete de agua ha detenido al robot en el aire, los ventiladores de los conductos pueden mantenerlo estable flotar a unos diez pies por encima de la cubierta. Cuando se cortan, el robot vuelve a caer y las piernas absorben el impacto. En el video, el robot tiene un par de correas sueltas como precaución de prueba, pero no brindan ningún soporte, energía u orientación.“Puede que no sea tan obvio para qué se puede usar esto directamente hoy en día, pero estos experimentos de prueba de concepto muestran que podríamos trabajar dentro de la física del mundo real para realizar las caídas altas que hacen nuestros personajes en la pantalla grande, y algún día lograr el aterrizaje”, explica Tony Dohi, líder del proyecto. . Todavía hay una gran cantidad de problemas que los proyectos futuros deben abordar. La mayoría de los personajes tienen piernas que se doblan sobre bisagras en lugar de comprimirse como pistones, y no usan un cinturón hecho de ventiladores con conductos. Más allá de las cuestiones de embalaje y forma, asegurarse de que el robot aterrice exactamente donde pretende aterrizar tiene implicaciones interesantes para la percepción y el control. De todos modos, creemos que podemos confirmar que este tipo de entrada tiene, si se me permite el juego de palabras, bastante impacto. Artículos de su sitio Artículos relacionados en la Web
Etiqueta: robótica Página 1 de 5



Durante años, Shadow Hand de Shadow Robot Company ha sido posiblemente el estándar de oro para la manipulación robótica. Hermoso y costoso, es capaz de imitar el factor de forma y la funcionalidad de la mano humana, lo que lo ha hecho ideal para tareas complejas. Personalmente he experimentado lo maravilloso que es usar Shadow Hands en un contexto de teleoperación, y es difícil imaginar algo mejor. El problema con la Shadow Hand original era (y sigue siendo) la fragilidad. En un entorno de investigación, esto ha estado bien, excepto que la investigación está cambiando: los robóticos ya no programan cuidadosamente las tareas de manipulación a mano. Ahora se trata de aprendizaje automático, en el que se necesitan manos robóticas que fallen masivamente una y otra vez hasta que acumulen suficientes datos para comprender cómo tener éxito. «Hemos apuntado a la robustez y el rendimiento por encima del antropomorfismo y el tamaño y la forma humanos». —Rich Walker, Shadow Robot Company Hacer esto con una Mano Sombra simplemente no era realista, algo que Google DeepMind entendió hace cinco años cuando le pidió a Shadow Robot que le construyera una nueva mano con hardware que pudiera manejar el tipo de entornos de entrenamiento que ahora tipifican la investigación sobre manipulación. . Entonces, Shadow Robot pasó la última media década trabajando en una nueva Shadow Hand de tres dedos, que la compañía presentó hoy. La compañía lo llama, muy apropiadamente, “el nuevo Shadow Hand”. Como puedes ver, esto es una auténtica bestia. Shadow Robot dice que la nueva mano es «robusta contra una cantidad significativa de uso indebido, incluidas demandas de fuerza agresivas, abrasión e impactos». Parte del punto, sin embargo, es que lo que los diseñadores de manos robóticas podrían llamar “mal uso”, los investigadores de manipulación de robots muy bien podrían llamar “progreso”, y la mano está diseñada para resistir la investigación sobre manipulación que trasciende los límites de lo que son los robots. el hardware y el software son físicamente capaces de hacerlo. Shadow Robot entiende que a pesar de sus mejores esfuerzos de ingeniería, esta nueva mano aún se romperá ocasionalmente (porque es un robot y eso es lo que hacen los robots), por lo que la compañía la diseñó para que fuera modular y fácil de reparar. Cada dedo es su propia unidad autónoma que se puede cambiar fácilmente, con cinco motores Maxon en la base del dedo que impulsan las cuatro uniones de los dedos a través de cables en un diseño que elimina el juego. Los propios cables necesitarán ser reemplazados de vez en cuando, pero es mucho más fácil hacerlo en el nuevo Shadow Hand que en el original. Shadow Robot dice que puedes cambiar todos los cables de una New Hand en el mismo tiempo que te llevaría reemplazar un solo cable en la mano anterior. Shadow Robot La nueva Shadow Hand en sí es algo más grande que una mano humana típica y más pesada. Además: cada unidad modular de dedo pesa 1,2 kilogramos y la mano entera de tres dedos pesa poco más de 4 kg. Los dedos tienen una cinemática similar a la humana y cada articulación puede moverse hasta 180 grados por segundo con la capacidad de ejercer al menos 8 newtons de fuerza en cada punta de los dedos. Tanto el control de fuerza como el control de posición están disponibles, y toda la mano ejecuta Robot Operating System, la colección de bibliotecas y herramientas de software de código abierto de la Open Source Robotics Foundation. Una de las características nuevas más interesantes de esta mano es la detección táctil. Shadow Robot ha decidido tomar la ruta óptica con sensores en la punta de los dedos, estilo GelSight. Cada yema de los dedos está cubierta de un gel suave y blando con miles de partículas incrustadas. Las cámaras ubicadas en los dedos detrás del gel rastrean cada una de esas partículas y, cuando la yema del dedo toca algo, las partículas se mueven. Basándose en ese movimiento, las yemas de los dedos pueden detectar con mucha precisión la magnitud y dirección incluso de fuerzas muy pequeñas. Y también hay aún más sensores en el interior de los dedos, con sensores de efecto Hall integrados para ayudar a proporcionar retroalimentación durante las tareas de agarre y manipulación. Shadow Robot La diferencia más sorprendente aquí es cuán completamente diferente de la filosofía de manipulación robótica representa esta nueva mano para Robot de las sombras. «Hemos apuntado a la robustez y el rendimiento por encima del antropomorfismo y el tamaño y la forma humanos», dice Rich Walker, director de Shadow Robot Company. «Existe una elección de diseño muy definida para conseguir algo que realmente se comporte mucho más como un manipulador optimizado que como una mano humana». Walker explica que Shadow Robot ve dos enfoques diferentes de manipulación dentro de la comunidad robótica en este momento: está el aprendizaje por imitación, donde un humano hace una tarea y luego un robot intenta hacer la tarea de la misma manera, y luego está el aprendizaje por refuerzo, donde un robot Intenta descubrir cómo realizar la tarea por sí solo. “Obviamente, esta mano se construyó desde cero para facilitar el aprendizaje por refuerzo”. La mano también se construyó desde cero para que fuera resistente y reparable, lo que tuvo un efecto significativo en el factor de forma. Para que los dedos sean modulares, tienen que ser gruesos, y tratar de meter cinco de ellos en una mano simplemente no era práctico. Pero debido a esta modularidad, Shadow Robot podría hacerte una mano de cinco dedos si realmente quisieras una. O una mano de dos dedos. O (y esta es una sugerencia de la empresa, no mía) «una araña gigante». En realidad, sin embargo, probablemente no sea útil quedarse estancado en el factor de forma. En lugar de ello, concéntrate más en lo que la mano puede hacer. De hecho, Shadow Robot me dice que la mejor manera de pensar en la mano en el contexto de la agilidad es tener tres pulgares, no tres dedos, pero Walker dice que «si la describimos así, la gente se confunde». Definitivamente es un lugar para el antropomórfico Shadow Hand original, y Shadow Robot no tiene planes de descontinuarlo. «Está claro que para algunas personas el antropomorfismo es un factor decisivo, tienen que tenerlo», dice Walker. “Pero para mucha gente, la idea de que podrían tener algo que sea realmente robusto y diestro y que pueda recopilar muchos datos, es lo suficientemente emocionante como para que valga la pena decir, bueno, ¿qué podemos hacer con esto? Estamos muy interesados en saber qué sucede”. El Shadow New Hand ya está disponible a partir de unos 74 000 dólares estadounidenses, según la configuración. Artículos de su sitio Artículos relacionados en la Web


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.ICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSSICSR 2024: 23–26 de octubre de 2024, ODENSE, DINAMARCACybathlon 2024: 25–27 de octubre de 2024, ZURICH ¡Disfruta de los vídeos de hoy! ¡Festo tiene abejas robot! Es un diseño muy inteligente, pero el tamaño me aterroriza de las abejas con las que Festo parece estar familiarizado.[ Festo ]¡Boing, boing, boing![ USC ]¿Por qué diablos te tomarías la molestia de programar un robot para que haga chips de batata y luego no devorarlos tú mismo?[ Dino Robotics ]Los robots móviles pueden transportar cargas útiles mucho mayores que su masa mediante la tracción de vehículos. Sin embargo, el terreno todoterreno presenta variaciones sustanciales en altura, pendiente y fricción, lo que puede provocar que la tracción se degrade o falle catastróficamente. Este artículo presenta un sistema que utiliza un manipulador multipropósito montado en un vehículo para adaptar físicamente el robot con anclajes únicos adecuados para un terreno particular para el transporte autónomo de carga útil.[ DART Lab ]Resulta que trabajar en una tarea colaborativa con un robot puede hacer que los humanos sean menos eficientes, porque tendemos a sobreestimar las capacidades del robot.[ CHI 2024 ]Wing publica un vídeo con el título «¿Cómo suenan los drones de Wing?», pero solo incluye un breve fragmento (aunque nada sin ruido de fondo) que revela a los espectadores y oyentes curiosos exactamente cómo suenan los drones de Wing. Porque, mira, un par de segundos de audio silenciado debajo de una voz en off en realidad no responde la pregunta. [ Wing ]Esta primera instancia de ROB 450 en el invierno de 2024 desafió a los estudiantes a sintetizar el conocimiento adquirido a través de sus cursos universitarios de Robótica en la Universidad de Michigan para utilizar un proceso de diseño y análisis sistemático e iterativo y aplicarlo para resolver un problema de Robótica real y abierto.[ Michigan Robotics ]Este seminario de Microsoft para futuros líderes en robótica e inteligencia artificial es de Catie Cuan en Stanford, sobre “Choreorobotics: enseñar a los robots a bailar con humanos”. A medida que los robots pasan de entornos industriales y de investigación a entornos cotidianos, los robots deben poder (1) aprender de los humanos mientras se beneficia de toda la gama de conocimientos humanos y (2) aprender a interactuar con los humanos de manera segura, intuitiva y social. Presentaré una serie de comportamientos convincentes de robots, donde la percepción y la interacción humanas están en primer plano en una variedad de tareas.[ UMD ]
![]()
Uno de los mayores desafíos para la robótica en este momento es el funcionamiento autónomo práctico en entornos no estructurados. Es decir, hacer cosas útiles en lugares en los que su robot no ha estado antes y donde las cosas pueden no resultarle tan familiares como a su robot le gustaría. Los robots prosperan gracias a la previsibilidad, lo que ha impuesto algunas restricciones molestas sobre dónde y cómo pueden implementarse con éxito. Pero en los últimos años, esto ha comenzado a cambiar, gracias en gran parte a un par de desafíos robóticos fundamentales planteados por DARPA. El DARPA Subterranean Challenge se desarrolló entre 2018 y 2021, colocando robots móviles en una serie de entornos subterráneos no estructurados. Y el programa DARPA RACER, actualmente en curso, asigna a los vehículos autónomos la tarea de navegar largas distancias fuera de la carretera. A través de estos programas se ha desarrollado una tecnología extremadamente impresionante, pero siempre hay una brecha entre esta investigación de vanguardia y cualquier aplicación del mundo real. Ahora, muchas de las personas involucradas en estos desafíos, incluidos expertos en robótica de la NASA, DARPA, Google DeepMind, Amazon y Cruise (por nombrar sólo algunos lugares) están aplicando todo lo que han aprendido para permitir una autonomía práctica en el mundo real para robots móviles en una startup llamada Field AI. Field AI fue cofundado por Ali Agha, quien anteriormente fue líder de grupo del Grupo de Movilidad Aérea del JPL de la NASA, así como del Grupo de Sistemas de Percepción del JPL. Mientras estuvo en JPL, Agha lideró el equipo CoSTAR, que ganó el circuito urbano DARPA Subterranean Challenge. Agha también ha sido el investigador principal de DARPA RACER, primero con JPL y ahora continúa con Field AI. “La IA de campo no es sólo una startup”, nos dice Agha. «Es la culminación de décadas de experiencia en IA y su implementación en el campo». Los entornos no estructurados son lugares donde las cosas cambian constantemente, lo que puede causar estragos en los robots que dependen de mapas estáticos. La parte de «campo» en Field AI es lo que hace La startup de Agha es única. Los robots que ejecutan el software de Field AI pueden manejar entornos no estructurados y no mapeados sin depender de modelos anteriores, GPS o intervención humana. Obviamente, este tipo de capacidad era (y es) de interés para la NASA y el JPL, que envían robots a lugares donde no hay mapas, no existe GPS y la intervención humana directa es imposible. Pero DARPA SubT demostró que también se pueden encontrar entornos similares en la Tierra. Por ejemplo, las minas, las cuevas naturales y el subsuelo urbano son extremadamente difíciles de navegar para los robots (e incluso para los humanos). Y esos son sólo los ejemplos más extremos: los robots que necesitan operar dentro de edificios o en la naturaleza tienen desafíos similares para comprender dónde están, hacia dónde van y cómo navegar en el entorno que los rodea. Un vehículo autónomo recorre kilómetros de desierto sin mapa previo, sin GPS y sin carretera. AI de campo A pesar de la dificultad que tienen los robots para operar en el campo, esta es una enorme oportunidad que Field AI espera abordar. Los robots ya han demostrado su valía en contextos de inspección, generalmente donde es necesario asegurarse de que nada va mal en un sitio industrial grande o para rastrear el progreso de la construcción dentro de un edificio parcialmente terminado. Hay mucho valor aquí porque las consecuencias de que algo se estropee son costosas o peligrosas o ambas cosas, pero las tareas son repetitivas y a veces arriesgadas y generalmente no requieren tanta percepción o creatividad humana. Territorio inexplorado como base de operacionesLo que diferencia a Field AI de otras empresas de robótica que ofrecen estos servicios, como explica Agha, es que su empresa quiere realizar estas tareas sin tener primero un mapa que le indique al robot adónde ir. En otras palabras, no hay un largo proceso de configuración ni supervisión humana, y el robot puede adaptarse a entornos nuevos y cambiantes. Realmente, de esto se trata la plena autonomía: ir a cualquier lugar, en cualquier momento, sin interacción humana. “Nuestros clientes no necesitan recibir formación alguna”, afirma Agha, al exponer la visión de la empresa. “No necesitan tener mapas precisos. Presionan un solo botón y el robot descubre cada rincón del entorno”. Esta capacidad es donde entra en juego la herencia de DARPA SubT. Durante la competencia, DARPA básicamente dijo: “aquí está la puerta al campo. No vamos a decirles nada sobre lo que hay detrás ni siquiera sobre su tamaño. Simplemente explora todo y tráenos la información que hemos solicitado”. El equipo CoSTAR de Agha hizo exactamente eso durante la competencia, y Field AI está comercializando esta capacidad. “Con nuestros robots, nuestro objetivo es que usted simplemente los implemente, sin necesidad de tiempo de entrenamiento. Y luego podremos dejar a los robots”. —Ali Agha, Field AI La otra cosa complicada de estos entornos no estructurados, especialmente los entornos de construcción, es que las cosas cambian constantemente, lo que puede causar estragos en los robots que dependen de mapas estáticos. «Somos una de las pocas, si no la única, que puede dejar robots durante días en obras en constante cambio con una supervisión mínima», nos dice Agha. “Estos sitios son muy complejos: cada día hay nuevos elementos, nuevos desafíos y eventos inesperados. Materiales de construcción en el suelo, andamios, montacargas y maquinaria pesada moviéndose por todos lados, nada que se pueda predecir”. El enfoque de Field AIField AI para este problema es enfatizar la comprensión ambiental sobre el mapeo. Agha dice que, esencialmente, Field AI está trabajando para crear «modelos básicos de campo» (FFM) del mundo físico, utilizando datos de sensores como entrada. Se puede pensar que los FFM son similares a los modelos básicos de lenguaje, música y arte que otras empresas de IA han creado en los últimos años, donde la ingesta de una gran cantidad de datos de Internet permite cierto nivel de funcionalidad en un dominio sin requiriendo una formación específica para cada nueva situación. En consecuencia, los robots de Field AI pueden entender cómo moverse en el mundo, en lugar de solo dónde moverse. «Consideramos la IA de manera muy diferente a la corriente principal», explica Agha. «Hacemos modelos probabilísticos muy pesados». Se incluirían muchos más detalles técnicos en la propiedad intelectual de Field AI, dice Agha, pero el punto es que el modelado del mundo en tiempo real se convierte en un subproducto de los robots de Field AI que operan en el mundo en lugar de un requisito previo para esa operación. Esto hace que los robots sean rápidos, eficientes y resistentes. El desarrollo de modelos de cimientos de campo que los robots puedan usar para ir de manera confiable a casi cualquier lugar requiere una gran cantidad de datos del mundo real, que Field AI ha estado recopilando en sitios industriales y de construcción de todo el mundo durante los últimos años. año pasado. Para ser claros, están recopilando los datos como parte de sus operaciones comerciales: estos son clientes de pago que Field AI ya tiene. “En estos lugares de trabajo, tradicionalmente puede llevar semanas recorrer un sitio y mapear dónde se encuentran todos los objetivos de interés que es necesario inspeccionar”, explica Agha. “Pero con nuestros robots, nuestro objetivo es que usted simplemente los implemente, sin necesidad de tiempo de capacitación. Y luego podemos dejar a los robots. Este nivel de autonomía realmente desbloquea muchos casos de uso que nuestros clientes ni siquiera estaban considerando porque pensaban que faltaban años”. Y los casos de uso no se refieren sólo a la construcción o la inspección u otras áreas en las que ya estamos viendo sistemas robóticos autónomos, afirma Agha. «Estas tecnologías tienen un potencial inmenso». Obviamente existe una demanda para este nivel de autonomía, pero Agha dice que la otra pieza del rompecabezas que permitirá a Field AI aprovechar un mercado de billones de dólares es el hecho de que pueden hacer lo que hacen con prácticamente cualquier plataforma. Básicamente, Field AI es una empresa de software: fabrican cargas útiles de sensores que se integran con su software de autonomía, pero incluso esas cargas útiles son ajustables, desde algo apropiado para un vehículo autónomo hasta algo que un dron puede manejar. Diablos, si decides que necesitas un humanoide autónomo por alguna extraña razón, Field AI también puede hacerlo. Si bien la versatilidad aquí es importante, según Agha, lo que es aún más importante es que significa que puede centrarse en plataformas que son más asequibles y seguir esperando el mismo nivel de rendimiento autónomo, dentro de las limitaciones del diseño de cada robot, por supuesto. Con control sobre toda la pila de software, integrando la movilidad con la planificación de alto nivel, la toma de decisiones y la ejecución de misiones, Agha dice que el potencial de aprovechar robots relativamente económicos es lo que marcará la mayor diferencia hacia el éxito comercial de Field AI. cerebro, muchos robots diferentes: los modelos básicos del equipo de Field AI se pueden usar en robots grandes, pequeños, costosos y algo menos costosos. Field AIField AI ya está ampliando sus capacidades, aprovechando parte de su experiencia reciente con DARPA RACER trabajando en el despliegue de robots para inspeccionar tuberías a lo largo de decenas de kilómetros y transportar materiales a través de parques solares. Con ingresos entrantes y una parte sustancial de la financiación, Field AI incluso ha atraído el interés de Bill Gates. La participación de Field AI en RACER continúa, bajo una especie de compañía subsidiaria para proyectos federales llamada Offroad Autonomy, y mientras tanto su lado comercial apunta a expandirse a «cientos» de sitios en todas las plataformas que pueda imaginar, incluidos los humanoides. Artículos del sitioArtículos relacionados en la Web

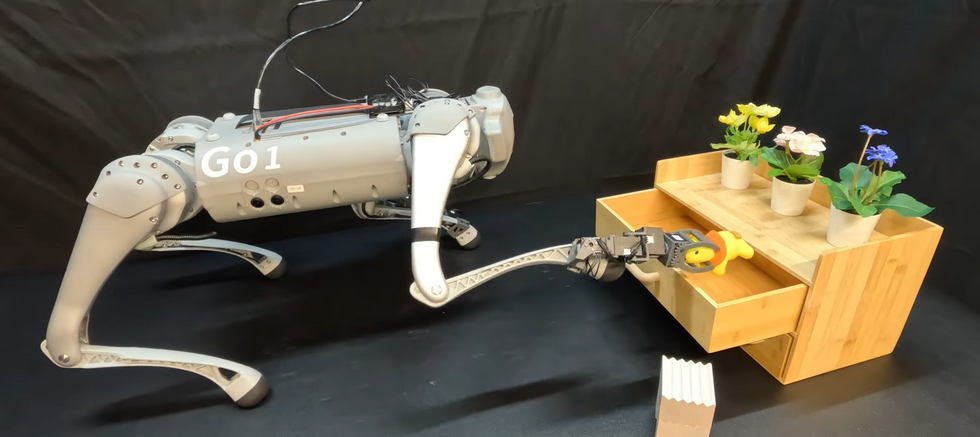
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSCybathlon 2024: 25-27 de octubre de 2024, ZÚRICH ¡Disfruta de los vídeos de hoy! En este trabajo, presentamos LocoMan, un diestro robot cuadrúpedo con una morfología novedosa para realizar manipulaciones versátiles en diversos entornos restringidos. Al equipar un robot Unitree Go1 con dos locomanipuladores modulares 3-DoF livianos y de bajo costo en sus pantorrillas delanteras, LocoMan aprovecha la movilidad y funcionalidad combinadas de las piernas y las pinzas para tareas de manipulación complejas que requieren un posicionamiento preciso en 6D del efector final. en un amplio espacio de trabajo.[ CMU ]¡Gracias, Changyi! La manipulación de objetos se ha estudiado ampliamente en el contexto de manipuladores móviles y de base fija. Sin embargo, la modalidad de locomoción sobreactuada empleada por los robots serpiente permite una combinación única de manipulación de objetos a través de la locomoción, conocida como locomanipulación. En este artículo, presentamos un enfoque de optimización para resolver el problema de manipulación locomotora basado en la planificación de rutas de contacto implícitas no impulsivas para nuestro robot serpiente COBRA.[ Silicon Synapse Lab ]Bien, pero donde ese disfraz tiene ojos no es donde Spot tiene ojos, por lo que Spot en el disfraz no puede ver, ¿verdad? Y ahora soy escéptico sobre la autenticidad del snoot-boop mutuo.[ Boston Dynamics ]Aquí hay un video de los robots de Field AI operando en entornos relativamente complejos y no estructurados sin mapas previos. ¡Asegúrate de leer nuestro artículo de esta semana para obtener más detalles![ Field AI ]¿Soy solo yo, o es un poco descabellado que los investigadores ahora publiquen artículos que comparan su controlador humanoide con el controlador humanoide del “fabricante”? Es como si los humanoides fueran una mercancía ahora o algo así.[ OSU ]Yo también estoy empacando armadura para ICRA.[ Pollen Robotics ]Honey Badger 4.0 es nuestra última plataforma robótica, creada específicamente para atravesar entornos hostiles y terrenos difíciles. Equipado con múltiples cámaras y sensores, se asegurará de que no se omita ningún defecto durante la inspección.[ MAB Robotics ]¡Gracias, Jakub! ¿Tiene una tarea de automatización que requiere la precisión y el torque de un brazo robótico industrial… pero necesita algo que sea más resistente o con un factor de forma no convencional? ¡Conozca el actuador HEBI Robotics serie H! Con 9 veces el torque de nuestra Serie X y una perfecta compatibilidad con el ecosistema HEBI para el desarrollo de robots, la Serie H abre un nuevo mundo de posibilidades para los robots.[ HEBI ]¡Gracias, Dave! Así es como ocurren todos los derrames en mi casa también: súper pasivo-agresivo.[ 1X ]El equipo de EPFL dirigido por el estudiante de doctorado Milad Shafiee, junto con los coautores Guillaume Bellegarda y el jefe del Laboratorio de BioRobótica Auke Ijspeert, han entrenado a un robot de cuatro patas utilizando aprendizaje de refuerzo profundo para navegar en terrenos desafiantes, logrando un hito tanto en robótica como en biología.[ EPFL ]En Agility fabricamos robots diseñados para trabajar. Nuestro robot Digit trabaja junto a nosotros en espacios pensados para las personas. Digit maneja las tareas tediosas y repetitivas propias de una máquina, lo que permite a las empresas y a su gente centrarse en el trabajo que requiere el elemento humano.[ Agility ]Con una gran cantidad de cifras increíbles y hechos destacados, aquí está Jan Jonsson, veterano de ABB Robotics, compartiendo su conocimiento y pasión por algunos de nuestros robots y controladores del pasado.[ ABB ][ Electric Sheep ]El Índice de IA, actualmente en su séptimo año, rastrea, recopila, destila y visualiza datos relacionados con la inteligencia artificial. El Índice proporciona datos imparciales, rigurosamente examinados y de origen global para que los formuladores de políticas, investigadores, periodistas, ejecutivos y el público en general desarrollen una comprensión más profunda del complejo campo de la IA. Dirigido por un comité directivo de influyentes líderes de opinión en IA, el Índice es el informe más completo del mundo sobre tendencias en IA. En este seminario, el gerente de investigación de HAI, Nestor Maslej, ofrece los aspectos más destacados del informe 2024, explicando las tendencias relacionadas con la investigación y el desarrollo, el desempeño técnico, la ética técnica de la IA, la economía, la educación, las políticas y la gobernanza, la diversidad y la opinión pública.[ Stanford HAI ]El seminario CMU RI de esta semana es de Dieter Fox en NVIDIA y UW, sobre «¿Dónde está RobotGPT?». En esta charla, discutiré enfoques para generar grandes conjuntos de datos para entrenar capacidades de manipulación de robots, con un enfoque en el papel que la simulación puede desempeñar en este contexto. . Mostraré algunos de nuestros trabajos anteriores, donde demostramos una transferencia sólida de simulación a real de habilidades de manipulación entrenadas en simulación, y luego presentaré un camino hacia la generación de conjuntos de demostración a gran escala que podrían ayudar a entrenar modelos robustos de manipulación de robots de mundo abierto.[ CMU ]


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSCybathlon 2024: 25-27 de octubre de 2024, ZURICH ¡Disfrute de los videos de hoy! El programa de Autonomía Robótica en Entornos Complejos con Resiliencia (RACER) de DARPA llevó a cabo recientemente su cuarto experimento (E4) para evaluar el rendimiento de vehículos no tripulados todoterreno. Estas pruebas, realizadas en Texas a finales de 2023, fueron la primera vez que el programa probó su nuevo vehículo, el RACER Heavy Platform (RHP). El vídeo muestra el seguimiento autónomo de rutas para pruebas y demostraciones de movilidad, incluidas visualizaciones de nubes de puntos de sensores. El RHP de 12 toneladas es significativamente más grande que los vehículos de flota RACER (RFV) de 2 toneladas que ya se utilizan en el programa. El uso de algoritmos en una plataforma muy diferente ayuda a RACER a lograr su objetivo de autonomía independiente de la plataforma de vehículos a escala de combate en entornos todoterreno complejos y relevantes para la misión que son significativamente más impredecibles que las condiciones en carretera.[ DARPA ]En nuestro nuevo artículo sobre Science Robotics, presentamos un sistema de navegación autónomo desarrollado para nuestros cuadrúpedos con ruedas, diseñado para una navegación rápida y eficiente dentro de grandes entornos urbanos. Impulsado por políticas de redes neuronales, nuestro sistema de control simple y unificado permite transiciones de marcha suaves, planificación de navegación inteligente y evitación de obstáculos con alta capacidad de respuesta en entornos urbanos poblados.[ Github ]La séptima generación de robots “Phoenix” incluye un rango de movimiento mejorado similar al humano. Las mejoras en el tiempo de actividad, la percepción visual y la detección táctil aumentan la capacidad del sistema para realizar tareas complejas durante períodos más largos. La iteración del diseño reduce significativamente el tiempo de construcción. La velocidad a la que se pueden automatizar nuevas tareas se ha multiplicado por 50, lo que marca un importante punto de inflexión en la velocidad de automatización de tareas.[ Sanctuary AI ]Estamos orgullosos de celebrar nuestra entrega comercial número un millón: un millón de entregas de sangre que salva vidas, vacunas críticas, comestibles de último momento y mucho más. ¿Pero la mejor parte? Este es solo el comienzo.[ Zipline ]¡Trabaja esas caderas![ RoMeLa ]Esto es algo aterrador y estoy fascinado.[ AVFL ]Proponemos un novedoso TWIMP humanoide, que combina un miembro superior musculoesquelético mimético humano con un péndulo invertido de dos ruedas. Combinando el beneficio de un humanoide musculoesquelético, que puede lograr un contacto suave con el entorno externo, y el beneficio de un péndulo invertido de dos ruedas con un tamaño pequeño y alta movilidad, podemos investigar fácilmente sistemas de control de aprendizaje en entornos con contacto y repentinos. Impacto. De Humanoides 2018.[ Paper ] a través de [ JSK Lab ]¡Gracias, Kento! Los Ballbots son excepcionalmente capaces de empujar sillas de ruedas, posiblemente mejores que las plataformas con patas, porque pueden moverse en cualquier dirección sin tener que reposicionarse.[ Paper ]Charge Robotics está construyendo robots que automatizan las partes de la construcción solar que requieren más mano de obra. La energía solar se ha convertido rápidamente en la forma más barata de generación de energía en muchas regiones. La demanda se ha disparado y ahora la principal barrera para instalarlo es la logística laboral y el ancho de banda. Nuestros robots eliminan el cuello de botella laboral, lo que permite a las empresas de construcción satisfacer la creciente demanda de energía solar y permitir que el mundo pase a las energías renovables más rápido.[ Charge Robotics ]Los robots que realizan ensamblajes de precisión son geniales y todo eso, pero esos clasificadores de tazones vibratorios parecen mágicos.[ FANUC ]El prototipo de robot del proyecto QUT CGRAS captura imágenes de corales bebés, destinados a la Gran Barrera de Coral, monitoreándolos y contándolos en tanques de cultivo. El equipo utiliza algoritmos de inteligencia artificial de última generación para detectar y contar automáticamente estos bebés de coral y realizar un seguimiento de su crecimiento a lo largo del tiempo, lo que ahorra tiempo y dinero al conteo humano.[ QUT ]Estamos realizando investigaciones para desarrollar sistemas aéreos no tripulados que ayuden en el monitoreo de incendios forestales. El entorno peligroso, dinámico y visualmente degradado de los incendios forestales da lugar a muchos desafíos de investigación fundamentales sin resolver.[ CMU ]Aquí hay un poco más de video de ese ascensor robótico, pero me pregunto por qué es tan lento: ¡sujeta esos robots allí y dispara el ascensor hacia arriba y hacia abajo![ NAVER ]En marzo de 2024, el Centro de Robótica y Biosistemas de la Universidad Northwestern demostró los robots colaborativos móviles Omnid (mocobots) en MARS, una conferencia en Ojai, California sobre aprendizaje automático, automatización, robótica y espacio, organizada por Jeff Bezos. El «enjambre» de mocobots está diseñado para colaborar con los humanos, permitiéndoles manipular fácilmente cargas útiles grandes, pesadas o incómodas. En este caso, los mocobots anulan el efecto de la gravedad, por lo que el humano puede manipular fácilmente el ala del avión simulado en seis grados de libertad. En general, los sistemas humano-cobot combinan lo mejor de las capacidades humanas con lo mejor de las capacidades de los robots.[ Northwestern ]Hay algo muy reconfortante en ver cómo una batería de litio se estropea y se quema durante 8 minutos.[ Hardcore Robotics ]EELS, o Exobiology Extant Life Surveyor, es un robot versátil con forma de serpiente diseñado para explorar terrenos que antes eran inaccesibles. Esta charla sobre EELS se presentó en la conferencia Amazon MARS de 2024.[ JPL ]La convergencia de la IA y la robótica desbloqueará un nuevo y maravilloso mundo de posibilidades en la vida cotidiana, dice la pionera en robótica e IA Daniela Rus. Profundizando en la forma en que piensan las máquinas, revela cómo las “redes líquidas” (una clase revolucionaria de IA que imita los procesos neuronales de organismos simples) podrían ayudar a las máquinas inteligentes a procesar información de manera más eficiente y dar lugar a una “inteligencia física” que permitirá a la IA operar más allá de los límites digitales y participar dinámicamente en el mundo real.[ TED ]


¿Cuál es un secreto para lograr que más estudiantes participen en una sociedad IEEE? Deles un asiento en la mesa para que puedan opinar sobre cómo se maneja la organización. Eso es lo que ha hecho la Sociedad de Automatización y Robótica IEEE. Los ingenieros en ciernes forman parte de la junta directiva de RAS, tienen privilegios de voto y trabajan dentro de comités técnicos. “Se les ha dado voz en el funcionamiento de la sociedad porque, al final, los estudiantes están entre los principales beneficiarios”, afirma Enrica Tricomi, presidenta del comité de actividades estudiantiles de la RAS. El SAC es responsable de los programas y beneficios estudiantiles. También hace recomendaciones a la junta directiva de la sociedad sobre nuevas ofertas. “Uno se siente escuchado y valorado cada vez que hay que tomar decisiones oficiales, porque la junta también quiere conocer la perspectiva de los estudiantes sobre cómo ofrecer beneficios a los miembros de la RAS, especialmente «Para los jóvenes investigadores, ya que se espera que sean los futuros líderes de la sociedad», dice Tricomi, un bioingeniero que está cursando un doctorado. en robótica en la Universidad de Heidelberg, en Alemania. El enfoque de la sociedad ha dado sus frutos. Desde 2018, la membresía estudiantil ha aumentado en más del 50 por ciento a 5,436. El número de capítulos de la sociedad en las sucursales estudiantiles ha aumentado de 312 en 2021 a 450. La capacidad de expresar opiniones no es la única razón por la que los estudiantes se unen, dice Tricomi. La sociedad lanzó recientemente varios programas para involucrarlos, incluidas ferias profesionales, becas de viaje y oportunidades para establecer contactos con investigadores. Brindar oportunidades de liderazgo a los estudiantes Como presidente del SAC, Tricomi es miembro con derecho a voto del comité administrativo de RAS, que supervisa las operaciones de la sociedad. Ella dice que tener privilegios de voto muestra «lo importante que es para la sociedad tener representación estudiantil». «Recibimos mucho apoyo de los niveles más altos de la sociedad, específicamente de la presidenta de la sociedad, Aude Billard, y del ex presidente Frank Chongwoo Park», dice Tricomi. “Los tableros de RAS se han rejuvenecido para involucrar aún más a los estudiantes y representar sus voces. Los presidentes de estas juntas, incluidas las actividades técnicas, las actividades de conferencias y las actividades de publicación, quieren conocer la opinión del presidente y los copresidentes del SAC sobre si las nuevas actividades están beneficiando a los estudiantes”. Los estudiantes miembros ahora pueden formar parte de comités técnicos del IEEE que involucran a la robótica en el papel de representantes de los estudiantes. Esa fue una iniciativa de Kyujin Cho, vicepresidente de Actividades Técnicas del IEEE. Tricomi dice que la designación beneficia a los ingenieros jóvenes porque aprenden sobre las investigaciones en curso en su campo y porque tienen acceso directo a los investigadores. Los representantes de los estudiantes también ayudan a organizar talleres de conferencias. Los estudiantes participaron en la creación de un kit de bienvenida para los asistentes a la conferencia. La iniciativa, dirigida por Amy Kyungwon Han, vicepresidenta asociada de Actividades Técnicas, enumera las actividades de cada día y su ubicación. «Creo que todos nosotros, especialmente los más jóvenes, podemos contribuir activamente y marcar la diferencia no sólo para la sociedad y para nosotros mismos, sino también para nuestros pares». Participar en el tema técnico en el que trabajan los estudiantes les proporciona crecimiento profesional, visibilidad en su campo y la oportunidad de compartir su punto de vista con sus compañeros, dice Tricomi. “Al ser joven, la primera vez que expresas tu opinión en público siempre te sientes incómodo porque no tienes mucha experiencia”, dice. “Esto es lo contrario del mensaje que la sociedad quiere enviar. Queremos escuchar las voces de los estudiantes porque son una parte importante de la sociedad”. La propia Tricomi se convirtió recientemente en miembro de la junta de Actividades Técnicas. Ella se unió, dice, porque “esta es una familia técnica por elección propia. Y quieres estar activo y contribuir a tu familia, ¿verdad? Creo que todos nosotros, especialmente los más jóvenes, podemos contribuir activamente y marcar la diferencia no sólo para la sociedad y para nosotros mismos, sino también para nuestros pares”. Ferias de empleo y subvenciones para viajes Se han lanzado varias iniciativas nuevas en las conferencias emblemáticas de la sociedad. Las reuniones siempre han incluido eventos en el sitio para que los estudiantes establezcan contactos entre sí y se relacionen con los investigadores durante el almuerzo. Los eventos brindan a los ingenieros en ciernes la oportunidad de hablar con líderes que normalmente no conocerían, dice Tricomi. «Es muy apreciado, especialmente por los estudiantes muy jóvenes o tímidos», dice. Algunos almuerzos han incluido sesiones sobre asesoramiento profesional por parte de líderes del mundo académico y de la industria, o de fundadores de nuevas empresas, lo que brinda a los estudiantes una idea de cómo es trabajar para este tipo de organizaciones. Las conferencias ahora incluyen ferias profesionales, donde los estudiantes pueden reunirse con empresas contratantes. La sociedad también desarrolló una plataforma de software que permite a los candidatos cargar su currículum en el sitio. Si son compatibles para un puesto vacante, las entrevistas se pueden realizar en el acto. Se han puesto a disposición de estudiantes con recursos limitados una variedad de becas de viaje para que puedan presentar sus trabajos de investigación en las principales conferencias de la sociedad. Se otorgaron más de 200 becas de viaje para la Conferencia Internacional IEEE sobre Robótica y Automatización de 2023, dice Tricomi. “Para ellos es muy importante estar ahí, presentar su trabajo, ganar visibilidad, compartir sus investigaciones y también establecer contactos”, afirma. La nueva subvención de viaje IDEA (inclusión, diversidad, equidad y accesibilidad) para grupos subrepresentados fue establecida por el comité de Mujeres en Ingeniería del IEEE de la sociedad y su presidenta, Karinne Ramírez Amaro. La beca puede ayudar a los estudiantes que no son presentadores a asistir a conferencias. También ayuda a aumentar la diversidad dentro del campo de la robótica, afirma Tricomi. El Programa de apoyo a los miembros es una nueva iniciativa de la vicepresidenta de la junta de actividades de los miembros de RAS, Katja Mombaur, y del ex vicepresidente Stefano Stramigioli. El apoyo financiero para asistir a la Conferencia Internacional anual sobre Robots y Sistemas Inteligentes está disponible para miembros y estudiantes que hayan contribuido a las actividades relacionadas con la misión de la sociedad. Los proyectos incluyen la organización de talleres, debates, conferencias o eventos de networking en conferencias o eventos patrocinados; servir en juntas o comités; o escribir artículos que fueron aceptados para publicación en congresos o revistas. La sociedad también involucra a ingenieros en ciernes en actividades de publicación a través de su Programa de Jóvenes Revisores, que les presenta las mejores prácticas para la revisión por pares. Los revisores senior asignan trabajos a los estudiantes para verificar y supervisar su trabajo. Oportunidades de crecimiento personal y profesional Tricomi se unió a la sociedad en 2021, poco después de comenzar su doctorado. programa en Heidelberg. Su investigación se centra en la robótica de asistencia portátil con fines de rehabilitación o aumento humano. Tiene una maestría en ingeniería biomédica del Politecnico di Torino, en Italia. Era nueva en el campo de la robótica, por lo que su doctorado. El asesor, Lorenzo Masia, miembro senior del IEEE, la animó a ofrecerse como voluntaria para la sociedad. Ahora está en transición al puesto de presidenta senior de SAC y dice que está ansiosa por colaborar con el nuevo equipo para promover la participación de los estudiantes y las carreras tempranas dentro del campo de la robótica. “Me he dado cuenta de que he crecido mucho en los dos años desde que comencé como presidenta”, dice. “Al principio era mucho más tímido. Realmente quiero que mis colegas experimenten el mismo crecimiento personal y profesional que yo. No solo aprendes habilidades técnicas sino también habilidades interpersonales, que son muy importantes en tu carrera”.

Si se ha estado preguntando cuándo podrá pedir el robot lanzallamas que Throwflame, con sede en Ohio, anunció por primera vez el verano pasado, ese día finalmente llegó. El Thermonator, lo que Throwflame considera “el primer perro robot con lanzallamas” ya está disponible para su compra. ¿El precio? $9,420.Thermonator es un robot cuadrúpedo con un lanzallamas ARC montado en su espalda, alimentado con gasolina o napalm. Cuenta con una batería de una hora, un alcance de lanzamiento de llamas de 30 pies y conectividad Wi-Fi y Bluetooth para control remoto a través de un teléfono inteligente. También incluye un sensor Lidar para mapeo y evitación de obstáculos, mira láser y visión en primera persona. -Ver navegación a través de una cámara a bordo. El producto parece integrar una versión del robot cuadrúpedo Unitree Go2 que se vende solo por 1.600 dólares en su configuración básica. Fotografía: Xmatter. La compañía enumera posibles aplicaciones del nuevo robot como «prevención y control de incendios forestales», «gestión agrícola», «conservación ecológica «, «remoción de nieve y hielo» y «entretenimiento y efectos de sonido». Pero, sobre todo, prende fuego a las cosas en una variedad de escenarios del mundo real. En 2018, Elon Musk fue noticia por ofrecer un lanzallamas oficial de Boring Company que, según se informa, vendió 10,000 unidades en 48 horas. Esto generó cierta controversia, porque los lanzallamas también pueden funcionar como armas o potencialmente provocar incendios forestales. Los lanzallamas no están regulados específicamente en 48 estados de EE. UU., aunque es posible que aún se apliquen leyes penales y de responsabilidad general sobre productos a su uso y venta. Las agencias federales no las consideran armas de fuego. Existen restricciones específicas en Maryland, donde se requiere una licencia federal de armas de fuego para poseer lanzallamas, y en California, donde el alcance de los lanzallamas no puede exceder los 10 pies. Fotografía: XmatterAun así, para decir lo obvio, los lanzallamas pueden quemar fácilmente tanto cosas como personas, provocando incendios. y causando estragos si no se utilizan de forma segura. En consecuencia, el Thermonator podría ser un regalo de Navidad que deberías omitir para el pequeño Johnny este año. Esta historia apareció originalmente en Ars Technica.

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, ALEMANIAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGOEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024 : 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los vídeos de hoy! En el proyecto SpaceHopper, estudiantes de ETH Zurich desarrollaron un robot capaz de moverse en entornos de baja gravedad mediante movimientos de salto. Está previsto que se utilice en futuras misiones espaciales para explorar pequeños cuerpos celestes. La exploración de asteroides y lunas podría proporcionar información sobre la formación del universo y pueden contener minerales valiosos que la humanidad podría utilizar en el futuro. El proyecto comenzó en 2021 como proyecto de enfoque ETH para estudiantes de licenciatura. Ahora continúa como un proyecto de investigación regular. Un desafío particular en el desarrollo de robots de exploración de asteroides es que, a diferencia de los cuerpos celestes más grandes como la Tierra, la gravedad de los asteroides y las lunas es baja. Por ello, los estudiantes probaron la funcionalidad de su robot en gravedad cero durante un vuelo parabólico. El vuelo parabólico se realizó en colaboración con la Agencia Espacial Europea como parte del Programa de Experimentos de la Academia de la ESA.[ SpaceHopper ]Todavía me resulta un poco extraño que ahora sea posible construir un robot como Menteebot. Dicho esto, en la actualidad parece que queda un largo camino por recorrer para poder realizar tareas de manera útil y confiable.[ Menteebot ]¡Mira, es el robot que todos queremos![ Github ]No estaba muy seguro de qué hacía que este edificio fuera especialmente “apto para robots” hasta que vi el ROBOT ELEVADOR DEDICADO.[ NAVER ]Nos complace anunciar las últimas actualizaciones de nuestro robot humanoide CL-1. En la prueba, demuestra cómo subir escaleras con una sola zancada basándose en la percepción del terreno en tiempo real. ¡Por primera vez, CL-1 logra correr de un lado a otro, de una manera estable y dinámica![ LimX Dynamics ]EEWOC [Extended-reach Enhanced Wheeled Orb for Climbing] utiliza un esquema de locomoción único para escalar estructuras de acero complejas con sus pinzas magnéticas. Su extremidad con resorte de cinta, liviana y altamente extensible, puede alcanzar más de 1,2 metros, lo que le permite atravesar huecos y obstáculos mucho más grandes que otros robots de escalada existentes. Su capacidad para doblarse le permite alcanzar esquinas y repisas, y puede pasar fácilmente de una superficie a otra gracias a la ayuda de sus ruedas. Las ruedas también le permiten conducir de forma más rápida y eficiente sobre el terreno. Estas características hacen que EEWOC sea ideal para escalar las complejas estructuras de acero que se ven en entornos del mundo real.[ Paper ]Gracias a sus “sensores de contacto con las nalgas”, el humanoide musculoesquelético de JSK ha dominado (más o menos) el patinete en silla.[ University of Tokyo ]¡Gracias, Kento! La fisioterapia parece una gran aplicación para un robot humanoide cuando realmente no necesitas que ese robot humanoide haga mucho.[ Fourier Intelligence ]El helicóptero Ingenuity Mars de la NASA se convirtió en el primer vehículo en lograr un vuelo controlado y propulsado en otro planeta cuando surcó los cielos marcianos el 19 de abril de 2021. Este vídeo mapea la ubicación de los 72 vuelos que realizó el helicóptero a lo largo de casi tres años. El ingenio superó con creces las expectativas: se elevó más alto y más rápido de lo que se imaginaba anteriormente.[ JPL ]¡No gracias![ Paper ]MERL presenta una nueva tecnología de ensamblaje robótico autónomo, que ofrece una visión inicial de cómo funcionarán los robots en las fábricas del futuro. A diferencia de los enfoques convencionales en los que los humanos establecen condiciones previas para el montaje, nuestra tecnología permite a los robots adaptarse a diversos escenarios. Mostramos el ensamblaje autónomo de una caja de cambios que se demostró en vivo en CES2024.[ Mitsubishi ]¡Gracias, Devesh! En noviembre de 2023, Digit se implementó en un centro de distribución descargando contenedores de un AMR como parte de las operaciones regulares de la instalación, incluido un turno durante el Cyber Monday.[ Agility ]El PR2 simplemente se niega a morir. La última vez que lo verifiqué, ¡el soporte oficial cesó en 2016![ University of Bremen ]El programa Air Combat Evolution (ACE) de DARPA ha logrado las primeras pruebas en el aire de algoritmos de IA que vuelan de forma autónoma un avión de combate contra un avión de combate pilotado por humanos en escenarios de combate dentro del alcance visual (a veces denominados «peleas de perros») En este video, los miembros del equipo analizan qué diferencia al programa ACE de otros proyectos de autonomía aeroespacial y cómo representa un momento transformador en la historia aeroespacial, estableciendo una base para una colaboración ética y confiable entre humanos y máquinas para aplicaciones militares y civiles complejas. [ DARPA ]A veces, los robots que existen para un solo propósito y que solo logran con éxito moderado mientras se esfuerzan mucho son los mejores robots.[ CMU ]

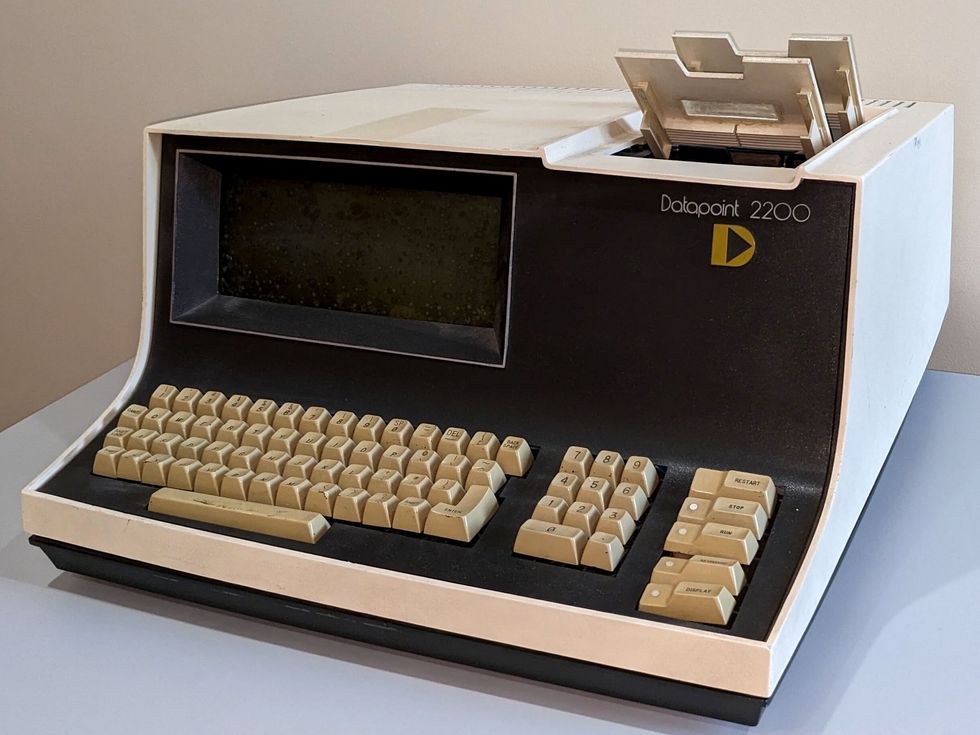
Como presidente del comité de historia de la Sección Lone Star del IEEE, en San Antonio, Texas, soy responsable de documentar, preservar y aumentar la visibilidad de las tecnologías desarrolladas en el área local. Una de esas tecnologías es el Datapoint 2200, un terminal programable que sentó las bases de la revolución de las computadoras personales. Lanzada en 1970 por Computer Terminal Corp. (CTC) en San Antonio, la máquina jugó un papel importante en los primeros días de las microcomputadoras. El sistema pionero integraba una CPU, memoria y dispositivos de entrada/salida en una sola unidad, convirtiéndolo en un dispositivo compacto y autónomo. A menudo se asocia a Apple, IBM y otras empresas con la popularización de las PC; No debemos pasar por alto las innovaciones pioneras introducidas por Datapoint. Puede que la máquina se haya borrado de la memoria, pero no se puede negar su influencia en la evolución de la tecnología informática. El comité de miembros vitalicios de la Región 5 del IEEE honró la máquina en 2022 con su premio Stepping Stone, pero me gustaría que más miembros conocieran las innovaciones introducidas por el diseño de la máquina. De mainframes a microcomputadorasAntes de la computadora personal, existían las mainframes. Las colosales máquinas, con sus voluminosos monitores verdes alojados en habitaciones meticulosamente refrigeradas, personificaban la vanguardia de la tecnología en ese momento. Tuve la suerte de trabajar con mainframes durante mi segundo año como estudiante de ingeniería eléctrica en la Universidad de los Emiratos Árabes Unidos en Al Ain, Abu Dhabi, en 1986. Las máquinas ocupaban salas enteras, eclipsando a las computadoras personales que conocemos hoy. Acceder a las computadoras centrales implicaba trabajar con terminales basadas en texto que carecían de interfaces gráficas y tenían capacidades limitadas. Esas terminales relativamente diminutas que interactuaban con las máquinas a menudo proporcionaban un toque de diversión a los estudiantes. Las salas de la computadora central servían como lugares sociales, fomentando interacciones, colaboraciones y competencias amistosas. Operar las terminales requería dominar comandos específicos y lenguajes de codificación. El proceso de enviar trabajos informáticos y esperar resultados sin respuesta inmediata puede resultar divertido y frustrante al mismo tiempo. Los estudiantes a menudo se referían con humor al “agujero negro”, donde sus trabajos parecían desaparecer hasta que los resultados se materializaban. Decodificar mensajes de error enigmáticos se convirtió en un desafío, pero los estudiantes disfrutaban descifrarlos y compartir ejemplos divertidos. A pesar de la potencia de los mainframes, tenían capacidades de procesamiento y memoria restringidas en comparación con las computadoras actuales. La introducción de las computadoras personales durante mi último año fue un juego. cambiador. No sabía que eventualmente me llevaría a San Antonio, Texas, lugar de nacimiento de la PC, donde comenzaría un nuevo capítulo de mi vida. La primera PCI En San Antonio, un grupo de ingenieros visionarios de la NASA fundó CTC con el objetivo de revolucionando la informática de escritorio. Introdujeron el Datapoint 3300 como reemplazo de los terminales Teletype. Dirigida por Phil Ray y Gus Roche, la empresa construyó más tarde la primera computadora de escritorio personal, la Datapoint 2200. También desarrollaron tecnología LAN y pretendieron reemplazar los equipos de oficina tradicionales con dispositivos electrónicos operables desde una sola terminal. El Datapoint 2200 introdujo varios elementos de diseño que luego fueron adoptados por otros fabricantes de computadoras. Fue una de las primeras computadoras en utilizar un teclado similar al de una máquina de escribir y un monitor para la interacción del usuario, que se convirtieron en dispositivos de entrada y salida estándar para las computadoras personales. Sentaron un precedente para interfaces informáticas fáciles de usar. La máquina también tenía unidades de casete para almacenamiento, predecesoras de las unidades de disco. La computadora tenía opciones para redes, módems, interfaces, impresoras y un lector de tarjetas. Utilizaba diferentes tamaños de memoria y empleaba una arquitectura de procesador de 8 bits. Inicialmente, la CPU del Datapoint estaba destinada a ser un chip personalizado, que finalmente llegó a conocerse como microprocesador. En ese momento, no existían tales chips, por lo que CTC contrató a Intel para producir uno. Ese chip fue el Intel 8008, que evolucionó hasta convertirse en el Intel 8080. Introducido en 1974, el 8080 formó la base de las computadoras pequeñas, según una entrada sobre los primeros microprocesadores en la Wiki de Historia de la Ingeniería y la Tecnología. Esos primeros microprocesadores de 8 bits están celebrando su 50 aniversario este año. El 2200 se comercializó principalmente para uso empresarial y su introducción ayudó a acelerar la adopción de sistemas informáticos en varias industrias, según Lamont Wood, autor de Datapoint: The Lost Story of the Texans Who Invented the Personal Computer Revolution. La máquina popularizó el concepto de terminales de computadora, que permitían a múltiples usuarios acceder a un sistema informático central de forma remota, escribió Wood. También introdujo la idea de una terminal como medio de interacción con una computadora central, permitiendo a los usuarios ingresar comandos y recibir resultados. El concepto sentó las bases para el desarrollo de las redes y la informática distribuida. Con el tiempo, condujo a la creación de LAN y redes de área amplia, que permitieron compartir recursos e información entre organizaciones. El concepto de terminales informáticos influyó en el desarrollo de las modernas tecnologías de redes, incluida Internet, señaló Wood. Cómo Datapoint inspiró a Apple e IBM Aunque el Datapoint 2200 no era una computadora orientada al consumidor, sus principios de diseño y su influencia desempeñaron un papel en el desarrollo de las computadoras personales. Su naturaleza compacta y autónoma demostró la viabilidad y el potencial de este tipo de máquinas. El Datapoint despertó la imaginación de investigadores y empresarios, lo que condujo a la disponibilidad generalizada de computadoras personales. A continuación se muestran algunos ejemplos de cómo los fabricantes construyeron sobre las bases establecidas por el Datapoint 2200: Apple se inspiró en las primeras microcomputadoras. El Apple II, presentado en 1977, fue uno de los primeros ordenadores personales de éxito. Incorporaba un teclado, un monitor y una interfaz de cinta de casete para almacenamiento, similar al Datapoint 2200. En 1984, Apple presentó el Macintosh, que presentaba una interfaz gráfica de usuario y un mouse, revolucionando la forma en que los usuarios interactuaban con las computadoras. IBM entró en el mercado de computadoras personales en 1981. Su PC también fue influenciada por los principios de diseño de las microcomputadoras. La máquina presentaba una arquitectura abierta, lo que permitía una fácil expansión y personalización. El éxito de la PC la estableció como un estándar en la industria. Microsoft jugó un papel crucial en el desarrollo de software para las primeras microcomputadoras. Su MS-DOS proporcionó una plataforma estandarizada para el desarrollo de software y era compatible con IBM PC y otras microcomputadoras. El sistema operativo ayudó a establecer a Microsoft como un actor dominante en la industria del software. Commodore International, un destacado fabricante de computadoras en la década de 1980, lanzó el Commodore 64 en 1982. Fue una microcomputadora exitosa que se basó en los conceptos del Datapoint 2200 y otros primeros. máquinas. El Commodore 64 presentaba un teclado integrado, gráficos en color y capacidades de sonido, lo que lo convertía en una opción popular para juegos e informática doméstica. Xerox hizo contribuciones significativas al avance de las interfaces informáticas. Su Alto, desarrollado en 1973, introdujo el concepto de interfaz gráfica de usuario, con ventanas, iconos y un mouse para la interacción. Aunque Alto no fue un éxito comercial, su influencia fue sustancial y ayudó a sentar las bases para los sistemas basados en GUI, incluidos Macintosh y Microsoft Windows. El Datapoint 2200 merece ser recordado por sus contribuciones a la historia de la informática.