

Video Friday es su selección semanal de increíbles videos de robótica, recopilados por sus amigos en IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para la inclusión. 10–12 de octubre de 2025, Osaka, Japóniros 2025: 19–25 de octubre de 2025, Hangzhou, Chinaenjoy Videos de hoy! ¡Los juegos de robot humanoide del primer mundo concluyen con éxito! Unitree golpea cuatro oro (1500m, 400 m, obstáculo de 100 m, relé de 4 × 100m).[ Unitree ]¡Estable! ¡Pndbotics Adam se ha convertido en el único atleta robot humanoide de tamaño completo en terminar con éxito la carrera de obstáculos de 100 metros en los Juegos Mundiales de Robot Humanoide![ PNDbotics ]Introducción de modelos de Field Foundation (FFMS) de FieldAI, una nueva clase de modelos de base «físicos primero» construidos específicamente para la inteligencia incorporada. A diferencia de los modelos de visión o lenguaje convencionales modernizados para la robótica, los FFM están diseñados desde el suelo hasta lidiar con incertidumbre, riesgo y las limitaciones físicas del mundo real. Esto permite comportamientos de robots seguros y confiables al administrar escenarios en los que no han sido entrenados, navegando entornos dinámicos y no estructurados sin mapas anteriores, GPS o rutas predefinidas.[ Field AI ]Multiply Labs, aprovechando los robots colaborativos de Universal Robots, ha desarrollado un grupo robótico innovador que está transformando fundamentalmente la fabricación de terapias genéticas y genéticas que salvan vidas. La solución Multiply Labs impulsa una asombrosa reducción de costos del 74% y permite hasta 100 veces dosis más del paciente por pie cuadrado de sala limpia.[ Universal Robots ]En este video, pusimos Vulcan V3, la primera mano robótica humanoide ambidiestra del mundo capaz de realizar el alfabeto completo del lenguaje de señas americano (ASL), a la prueba definitiva, ¡junto con un verdadero humano![ Hackaday ]¡Gracias, Kelvin! Más robots necesitan tener este factor de forma.[ Texas A & M University ]Las aspiradoras robóticas son tan generalizadas ahora que es fácil olvidar cuánto de un ícono ha sido el Irobot Roomba.[ iRobot ]Esta es posiblemente la mano robótica más grande que he visto.[ CAFE Project ] a través de [ BUILT ]Los robots modulares construidos por los investigadores de Dartmouth están encontrando sus pies al aire libre. Diseñado para ensamblar en estructuras que mejor se adaptan a la tarea en cuestión, los robots se unen a partir de bloques robóticos en forma de cubo que combinan varillas rígidas y cadenas suaves y elásticas cuya tensión se puede ajustar para deformar los bloques y controlar su forma.[ Dartmouth ]Nuestro robot X30 cuadrúpedo ha completado misiones de ambiente extremo en HOH XIL, soportando equipos de patrulla, transportando suministros vitales y protegiendo ecosistemas frágiles.[ DEEP Robotics ]Proponemos un robot en forma de base llamado «Koboshi» que mueve los objetos cotidianos. Este koboshi tiene una superficie esférica en contacto con el piso, y al mover un peso en el interior utilizando motores incorporados, puede rockear hacia arriba y hacia abajo, y de lado a lado. Al colocar elementos cotidianos en este koboshi, los usuarios pueden impartir un nuevo movimiento a objetos estáticos. El Koboshi está equipado con sensores para medir su postura, permitiendo la interacción con los usuarios. Además, tiene capacidades de comunicación, lo que permite que varias unidades se comuniquen entre sí.[ Paper ]Bi-Lat es el primer modelo de acción-idioma de visión (VLA) del mundo que integra el control bilateral en el aprendizaje de imitación, lo que permite a los robots ajustar los niveles de fuerza en función de las instrucciones del lenguaje natural.[ Bi-LAT ] ser presentado en [ IEEE RO-MAN 2025 ]¡Gracias, Masato! Mira a este pequeño y alegre chico! Aunque obviamente cortan el video justo antes de que se aplique a la cara primero en los muebles más de una vez.[ Paper ] ser presentado en [ 2025 IEEE-RAS International Conference on Humanoid Robotics ]Esta investigación se ha realizado en el Laboratorio de Robótica Centrado Human en UT Austin. El video muestra nuestro último robot bípedo experimental, denominado Mercurio, que tiene pies pasivos. Esto significa que no hay tobillos accionados, a diferencia de los humanos, obligando a Mercurio a ganar equilibrio mediante un paso dinámico.[ University of Texas at Austin Human Centered Robotics Lab ]Ponemos dos robots de entrega RIVR a trabajar con un vehículo autónomo, mostrando cómo la IA física puede manejar la última milla completa, desde el almacén hasta las puertas de los consumidores.[ Rivr ]El KR Titan Ultra es un robot industrial de alto rendimiento que pesa 4.6 toneladas y es capaz de manejar cargas útiles de hasta 1.5 toneladas.[ Kuka ]CMU Meche’s Ding Zhao y Ph.D. El estudiante Yaru Niu describe a Locoman, un asistente robótico que han estado desarrollando.[ Carnegie Mellon University ]Hace veintidós años, el ejecutivo de Silicon Valley, Henry Evans, tuvo un golpe masivo que lo dejó mudo y paralizado del cuello hacia abajo. Pero eso no le impidió convertirse en un defensor líder de la tecnología robótica adaptativa para ayudar a las personas discapacitadas, o escribir canciones country, una carta a la vez. El corresponsal John Blackstone habla con Evans sobre su actitud optimista y sus actividades poco probables.[ CBS News ]De los artículos de su sitio Artículos relacionados en la web
Etiqueta: robots cuadrúpedos



Video Friday es su selección semanal de increíbles videos de robótica, recopilados por sus amigos en IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Please send us your events for inclusion.World Humanoid Robot Games: 15–17 August 2025, BEIJINGRO-MAN 2025: 25–29 August 2025, EINDHOVEN, THE NETHERLANDSCLAWAR 2025: 5–7 September 2025, SHENZHEN, CHINAACTUATE 2025: 23–24 September 2025, SAN FRANCISCOCoRL 2025: 27–30 September 2025, SEOULIEEE Humanoides: 30 de septiembre al 2 de octubre de 2025, Seoulworld Robot Summit: 10–12 de octubre de 2025, Osaka, Japóniros 2025: 19–25 de octubre de 2025, Hangzhou, Chinaenjoy Videos de hoy! El A2 establece un nuevo estándar en robots cuadrupbidos, equilibrando la resistencia, la fuerza, la velocidad y la percepción de hoy. Completamente cargado con una carga útil de 25 kg (55 lb), puede caminar continuamente durante 3 horas o aproximadamente 12.5 km. Descargado, puede caminar continuamente durante 5 horas o aproximadamente 20 km. Las baterías duales ajustables en caliente habilitan un intercambio de batería sin problemas y un tiempo de ejecución continuo para cualquier misión.[ Unitree ]Gracias, William! Abb está trabajando con edificios cósmicos para remodelar cómo las comunidades reconstruyen y transforman la construcción después del desastre. En respuesta a los incendios forestales del sur de California del Sur de 2025, los edificios cósmicos están implementando microfactorias robóticas móviles para construir viviendas modulares en el sitio, lo que lleva el tiempo de construcción en un 70% y los costos en un 30%.[ ABB ]¡Gracias, Caitlin! ¿Cuántos ingenieros ligeramente incómodos pueden tirar su robot humanoide?[ MagicLab ]La mano del robot físico hace algunas cosas ingeniosas a aproximadamente 1 minuto.[ ETH Zurich Soft Robotics Lab ]Biólogos, todos pueden ir a casa ahora.[ AgileX ]Los juegos mundiales de robot humanoide comienzan la próxima semana en Beijing y, por supuesto, Tech United Eindhoven están allí.[ Tech United ]Nuestro USX-1 Defiant es un nuevo tipo de plataforma marítima autónoma, con el potencial de transformar la forma en que diseñamos y construimos barcos. Mientras el equipo prepara a Defiant para una manifestación extendida en el mar, el gerente del programa Greg Avicola comparte el pensamiento fundamental detrás del buque innovador.[ DARPA ]Después de la pérdida, ¿cómo se traduce el dolor en la creación? La meditación sobre la muerte es la pintura más personal y profunda de Paul Kirby, un viaje a través del amor, la pérdida y el misterio de la vida futura. Inspirado en una conversación con un chamán nativo americano y años de exploración artística, Paul fusiona la tecnología y el arte tradicional para capturar el paso del espíritu más allá. Con 5.796 pinceladas, un sistema de pintura robótica personalizada y una visión conformada por la memoria y la devoción, esta es la pintura más importante que haya hecho.[ Dulcinea ]¡Gracias, Alexandra! En la cuarta entrega de nuestra serie de entrevistas de video de videos profundos de Moonshot Podcast, el Capitán de Moonshots Astro Teller se sienta con Andrew Ng, el fundador de Google Brain y Deeplearning.ai, para una conversación sobre la historia de la investigación de la red neuronal y cómo las ideas de pionero de Andrew condujeron a algunos de los mayores avances en la IA moderna.[ Moonshot Podcast ]De los artículos de su sitio Artículos relacionados en la web


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, ALEMANIAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGOEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024 : 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los videos de hoy!USC, UPenn, Texas A&M, Oregon State, Georgia Tech, Temple University y NASA Johnson Space Center están enseñando como perros robots para navegar por los cráteres de la luna y otras superficies planetarias desafiantes en una investigación financiada por la NASA.[ USC ]AMBIDEX es un robot revolucionario que es rápido, liviano y capaz de realizar una manipulación similar a la de un humano. Hemos añadido un sensor en la cabeza, el torso y la cintura para ampliar enormemente el rango de movimiento. En comparación con la versión anterior centrada en el brazo, la impresión general y el equilibrio han cambiado por completo.[ Naver Labs ]Todavía necesita mucho trabajo, pero el polinizador de seis brazos, Stickbug, ahora puede navegar y polinizar flores de forma autónoma en un invernadero. Creo que «necesita mucho trabajo» en realidad significa «necesita un par de brazos más».[ Paper ]¡Experimente el futuro de la robótica mientras el robot humanoide de UBTECH se integra con ERNIE de Baidu a través de AppBuilder! Robots testigo [that] comprender el lenguaje y realizar de forma autónoma tareas como doblar ropa y clasificar objetos.[ UBTECH ]Sé que las aletas de este robot son para caminar bajo el agua en lugar de en tierra, pero al verlo moverse, siento que está destinado a evolucionar hacia algo un poco más terrestre.[ Paper ] a través de [ HERO Lab ]Además, si es propietario de un robot aspirador, recuerde limpiarlo de vez en cuando. Aquí se explica cómo hacerlo con un Roomba:[ iRobot ]El vídeo muestra las pruebas de cuenca de olas de un vehículo submarino anfibio no tripulado de hélice cicloidal (Cyclo-UUV) de 43 kg (95 lb) desarrollado en el Laboratorio Avanzado de Vuelo Vertical de la Universidad Texas A&M. El uso de ciclohélices permite una vectorización de empuje de 360 grados para una controlabilidad dinámica más robusta en comparación con los UUV con hélices de tornillo convencionales.[ AVFL ]Sony todavía está actualizando Aibo con nuevas funciones, como la capacidad de escuchar tu terrible música y bailar.[ Aibo ]Operar robots con precisión y a altas velocidades ha sido un objetivo de larga data de la investigación en robótica. Para permitir movimientos dinámicos precisos y seguros, presentamos un brazo robótico impulsado por tendones de cuatro grados de libertad (DoF). Los tendones permiten colocar la actuación en la base para reducir la inercia del robot, lo que demostramos que reduce significativamente las fuerzas máximas de colisión en comparación con los sistemas convencionales impulsados por motor. Emparejar nuestro robot con músculos neumáticos permite generar altas fuerzas y movimientos altamente acelerados, mientras se beneficia de la resistencia al impacto a través de la conformidad pasiva.[ Max Planck Institute ]Los rovers en Marte anteriormente quedaron atrapados en suelos sueltos, y al girar las ruedas los excavaron más profundamente, como un automóvil atrapado en la arena. Para evitar esto, Rosalind Franklin cuenta con un exclusivo modo de locomoción sobre ruedas para superar terrenos difíciles, así como un software de navegación autónomo.[ ESA ]Cassie puede caminar sobre arena, grava y rocas dentro del Robot Playground de la Universidad de Michigan. Vaya, se detuvieron antes de llegar a las rocas divertidas.[ Paper ] a través de [ Michigan Robotics ]Nada mal para 2016, ¿verdad?[ Namiki Lab ]MOMO ha aprendido los movimientos de baile de Bam Yang Gang con su destreza manual. 🙂 Al analizar videos de danza en 2D, extraemos datos detallados del esqueleto de la mano, lo que nos permite recrear los movimientos en 3D usando un modelo de mano. Con esta información, MOMO replica los movimientos de baile con las articulaciones de sus brazos y manos.[ RILAB ] a través de [ KIMLAB ]Este seminario GRASP SFI de UPenn es de Eric Jang de 1X Technologies, sobre «Motores de datos para robots humanoides». La misión de 1X es crear un suministro abundante de trabajo físico a través de androides que trabajan junto a los humanos. Compartiré algunos de los avances que 1X ha realizado hacia la manipulación móvil de uso general. Hemos ampliado la cantidad de tareas que nuestros androides pueden realizar combinando una estrategia de aprendizaje de un extremo a otro con un sistema sin código para agregar nuevas capacidades robóticas. Nuestro equipo de operaciones de Android entrena sus propios modelos con los datos que ellos mismos recopilan, lo que produce un conjunto de datos «de la granja a la mesa» de muy alta calidad que se puede utilizar para aprender comportamientos extremadamente capaces. También compartiré un avance del progreso que hemos estado logrando hacia un “modelo mundial” generalista para robots humanoides.[ UPenn ]Este seminario de Microsoft para futuros líderes en robótica e inteligencia artificial es de Chahat Deep Singh de la Universidad de Maryland, sobre «Percepción mínima: habilitación de la autonomía en robots del tamaño de la palma de la mano». La solución a la autonomía de los robots se encuentra en la intersección de la inteligencia artificial, la visión por computadora y imágenes y robótica, lo que da como resultado robots mínimos. Esta charla explora el desafío de desarrollar un marco de percepción mínima para robots diminutos (menos de 6 pulgadas) utilizados en operaciones de campo, como inspecciones espaciales en espacios confinados y polinización por robots. Además, profundizaremos en el ámbito de la percepción selectiva, la IA incorporada y el futuro de la autonomía del robot en la palma de tu mano.[ UMD ]
Source link


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, GERMANYAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGO, CAEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los vídeos de hoy! Los ingenieros de Columbia construyen Emo, una cara robótica revestida de silicio que establece contacto visual y utiliza dos modelos de IA para anticipar y replicar la sonrisa de una persona antes de que realmente sonría: un avance importante en los robots que predicen con precisión las expresiones faciales humanas, mejoran las interacciones y generan confianza entre humanos y robots.[ Columbia ]Investigadores de la Universidad de Stanford han inventado una forma de aumentar los motores eléctricos para hacerlos mucho más eficientes a la hora de realizar movimientos dinámicos a través de un nuevo tipo de actuador, un dispositivo que utiliza energía para hacer que las cosas se muevan. Su actuador, publicado el 20 de marzo en Science Robotics, utiliza resortes y embragues para realizar una variedad de tareas con una fracción del uso de energía de un motor eléctrico típico.[ Stanford ]Lo siento, pero el mundo no necesita más bateristas.[ Fourier Intelligence ]Siempre es bueno ver a Valakyrie de la NASA realizando investigaciones.[ NASA ]En terrenos desafiantes, la construcción de estructuras como antenas y mástiles de teleféricos a menudo requiere el uso de helicópteros para transportar cargas mediante cuerdas. Desafiando este paradigma, presentamos Geranos: un vehículo aéreo no tripulado (UAV) multirotor especializado diseñado para mejorar el transporte y el ensamblaje aéreos. . Nuestra demostración experimental que imita las instalaciones de mástiles de antenas/teleféricos muestra la capacidad de Gerano para apilar postes (3 kilogramos, 2 metros de largo) con una notable precisión de colocación inferior a 5 centímetros, sin necesidad de intervención manual humana.[ Paper ]Elios 2 de Flyability en noviembre de 2020 ayudó a los investigadores a inspeccionar el reactor 5 en el lugar del desastre nuclear de Chernobyl para determinar si había uranio presente en el área. Hasta entonces, el reactor 5 no había sido investigado desde el desastre de 1986.[ Flyability ]Hasta ahora se han desarrollado varios humanoides musculoesqueléticos. Si bien estos humanoides tienen la ventaja de sus cuerpos flexibles y redundantes que imitan el cuerpo humano, todavía están lejos de ser aplicados a tareas del mundo real. Una de las razones de esto es la dificultad de caminar bípedo en un cuerpo flexible. Por lo tanto, desarrollamos un robot musculoesquelético con ruedas, Musashi-W, combinando una base con ruedas y extremidades superiores musculoesqueléticas para aplicaciones del mundo real.[ Paper ]¡Gracias, Kento! Una tendencia reciente en robótica industrial es tener manipuladores robóticos trabajando lado a lado con operadores humanos. Un aspecto desafiante de esta coexistencia es que se requiere que el robot resuelva de manera confiable problemas complejos de planificación de rutas en un entorno que cambia dinámicamente. Para garantizar la seguridad del operador humano y al mismo tiempo lograr la realización eficiente de la tarea, este documento presenta… un esquema [that] puede dirigir el brazo del robot a la postura de efector final deseada en presencia de saturación del actuador, rangos articulares limitados, límites de velocidad, un entorno de obstáculos estáticos desordenado y colaboradores humanos en movimiento.[ Paper ]¡Gracias, Kelly! Nuestro manipulador móvil Digit trabajó de forma continua durante 26 horas divididas en los 3,5 días de Modex 2024, en Atlanta. Todo fue rastreado y coordinado por nuestro producto más nuevo, Agility Arc, una plataforma de automatización en la nube.[ Agility ]Estamos construyendo robots que pueden mantener a las personas fuera de peligro: Spot permite a los operadores investigar y reducir situaciones peligrosas de forma remota. Los robots se han utilizado en aplicaciones gubernamentales y de seguridad pública durante décadas, pero la movilidad inigualable y la interfaz intuitiva de Spot están cambiando la respuesta a incidentes de los departamentos en el campo hoy en día.[ Boston Dynamics ]Este artículo presenta un robot transformador aéreo biestable (BAT), un novedoso vehículo aéreo híbrido (HAV) transformable que cambia entre los modos cuadrotor y ala fija mediante una rápida aceleración y sin ninguna actuación adicional más allá de las necesarias para el vuelo normal.[ Paper ]Baymax de Disney suele ser el centro de atención en muchas presentaciones de investigación dedicadas a la interacción física humano-robot (pHRI) suave y segura. El reciente artículo de KIMLAB en TRO muestra un paso hacia la realización del concepto Baymax al envolver los esqueletos de PAPRAS (Sistema de brazo robótico Plug And Play) con pieles suaves y utilizarlas para funciones sensoriales.[ Paper ]Atrápame si puedes![ CVUT ]El aprendizaje por refuerzo profundo (RL) ha demostrado resultados impresionantes en la resolución de tareas robóticas complejas, como la locomoción cuadrúpeda. Sin embargo, los solucionadores actuales no logran producir políticas eficientes que respeten restricciones estrictas. En este trabajo, abogamos por la integración de restricciones en el aprendizaje de robots y presentamos Restricciones como terminaciones (CaT), un novedoso algoritmo de RL restringido.[ CaT ]¿Por qué el sueño de tener un robot en casa que haga tus tareas aún no se ha hecho realidad? Con tres décadas de experiencia en investigación en este campo, el robótico Ken Goldberg arroja luz sobre la cruda verdad sobre los robots y lo que se necesitará para construir máquinas más diestras para trabajar en un almacén o ayudar en casa.[ TED ]Diseñado como una demostración de tecnología que permitiría realizar hasta cinco vuelos de prueba experimentales en un lapso de 30 días, el helicóptero de Marte superó las expectativas (repetidamente) y recientemente completó su misión después de haber registrado la increíble cantidad de 72 vuelos durante casi tres años. Únase a nosotros para una charla en vivo para aprender cómo el equipo de Ingenuity utilizó el ingenio y la creatividad para transformar el helicóptero de una demostración tecnológica exitosa en un útil explorador para el rover Perseverance, demostrando en última instancia el valor de la exploración aérea para futuras misiones interplanetarias.[ JPL ]Únase a nosotros para una animada mesa redonda con los miembros de la facultad GRASP, el Dr. Pratik Chaudhari, el Dr. Dinesh Jayaraman y el Dr. Michael Posa. Este panel será moderado por el Dr. Kostas Daniilidis en torno al tema candente actual de la IA incorporada en la robótica.[ Penn Engineering ]
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSDisfrute de los videos de hoy !Vea el viaje de NVIDIA desde ser pionero en hardware avanzado para vehículos autónomos y herramientas de simulación hasta percepción y manipulación aceleradas para robots móviles autónomos y brazos industriales, culminando en la próxima ola de IA de vanguardia para robots humanoides.[ NVIDIA ]En la versión 4.0, mejoramos las habilidades de locomoción de Spot gracias al poder del aprendizaje por refuerzo. Paul Domanico, ingeniero en robótica de Boston Dynamics, habla de cómo el enfoque híbrido de Spot de combinar el aprendizaje por refuerzo con el control predictivo del modelo crea un robot aún más estable en los entornos más antagónicos.[ Boston Dynamics ]Estamos entusiasmados de compartir nuestro último progreso en la enseñanza de habilidades de propósito general a los EVE. Todo en el video es autónomo, todo a velocidad 1X, todo controlado con un único conjunto de pesos de red neuronal.[ 1X ]Lo que encuentro interesante acerca de que el Unitree H1 haga un giro de pie es dónde decide poner sus piernas.[ Unitree ]En la Exposición MODEX de marzo de 2024, Pickle Robot demostró cómo recoger carga de una pila aleatoria similar a lo que se ve en un remolque de camión desordenado después de haber rebotado durante muchos kilómetros de carretera. Las pilas de cajas nunca volvieron a ser las mismas y la manifestación se realizó en vivo frente a una multitud de espectadores 25 veces durante 4 días. Ningún otro sistema robótico de descarga de contenedores o remolques ha demostrado todavía esta capacidad de recoger pilas no estructuradas.[ Pickle ]RunRu es un robot parecido a un coche, un coche parecido a un robot, con autonomía, sociabilidad y operatividad. Se trata de un nuevo tipo de vehículo personal que pretende crear una relación “Jinba-Ittai” con sus pasajeros, que no sólo son siempre asertivos, sino que a veces también se quejan.[ ICD-LAB ]Verdie fue al GTC este año y se ganó el corazón de la gente, pero tal vez no el de los otros robots.[ Electric Sheep ]“DEEPRobotics AI+” combina capacidades de IA con sistemas de software robóticos para impulsar continuamente la inteligencia incorporada. El logro mostrado es el resultado del entrenamiento de un nuevo sistema de software e inteligencia artificial.[ DEEP Robotics ]Si desea recopilar datos para el agarre del robot, usar Stretch y un par de pinzas es lo más asequible posible.[ Hello Robot ]La verdadera razón por la que las piernas de Digit miran hacia atrás es para que no se golpee las espinillas al sacar las GPU del horno. Mientras tanto, algunos de nosotros podemos hornear nuestras GPU sin siquiera necesitar un horno.[ Agility ]P1 es el innovador robot bípedo de pie puntiagudo de LimX Dynamics, que sirve como una plataforma importante para el desarrollo sistemático y las pruebas modulares del aprendizaje por refuerzo. Se utiliza para avanzar en la investigación y la iteración de las habilidades básicas de locomoción bípeda. El éxito de P1 en la conquista del terreno forestal es un testimonio de la investigación y el desarrollo sistemático de LimX Dynamics en el aprendizaje por refuerzo.[ LimX ]Y ahora, esto.[ Suzumori Endo Lab ]Cocinar en las cocinas es divertido. ¡PERO hacerlo en colaboración con dos robots es aún más satisfactorio! Presentamos MOSAIC, un marco modular que coordina múltiples robots para colaborar estrechamente y cocinar con los humanos a través de la interacción del lenguaje natural y un depósito de habilidades.[ Cornell ]neoDavid es un humanoide robusto con diestras habilidades de manipulación, desarrollado en DLR. El objetivo principal en el desarrollo de neoDavid es acercarse lo más posible a las capacidades humanas, especialmente en términos de dinámica, destreza y robustez.[ DLR ]Bienvenido a nuestra serie de videos destacados para clientes donde mostramos algunos de los robots notables en los que nuestros clientes han estado trabajando. En este episodio, mostramos tres UGV de Clearpath Robotics que nuestros clientes utilizan para crear asistentes robóticos para tres aplicaciones diferentes.[ Clearpath ]Este vídeo presenta la nueva mano robótica de tres dedos de KIMLAB, que cuenta con sensores táctiles suaves para mejorar las capacidades de agarre. Aprovechando materiales de impresión 3D rentables, garantiza robustez y eficiencia operativa.[ KIMLAB ]Varios enfoques de planificación conscientes de la percepción han intentado mejorar la precisión de la estimación del estado durante las maniobras, mientras que a menudo se ha pasado por alto la compatibilidad de características entre marcos, un factor crucial que influye en la precisión de la estimación. En este artículo, presentamos APACE, un marco de generación de trayectorias ágil y consciente de la percepción para vuelos agresivos con quadrotores, que tiene en cuenta la compatibilidad de características durante la planificación de trayectorias.[ Paper ] a través de [ HKUST ]En este vídeo, vemos a Samuel Kunz, el piloto del equipo RSL Assistance Robot Race de ETH Zurich, mientras participa en los CYBATHLON Challenges 2024. Samuel completó las cuatro tareas designadas: recuperar un paquete de un buzón, usar un cepillo de dientes, colgar una bufanda en un tendedero y vaciar un lavavajillas, con la ayuda de un robot asistente. Logró una puntuación perfecta de 40 sobre 40 puntos y consiguió el primer puesto en la carrera, completando las tareas en 6,34 minutos.[ CYBATHLON ]Florian Ledoux es un fotógrafo de vida silvestre con un profundo amor por el Ártico y su vida silvestre. Usando el Mavic 3 Pro, pisa el hielo listo para capturar la belleza pura y las historias de este lugar frío y remoto.[ DJI ]
Source link
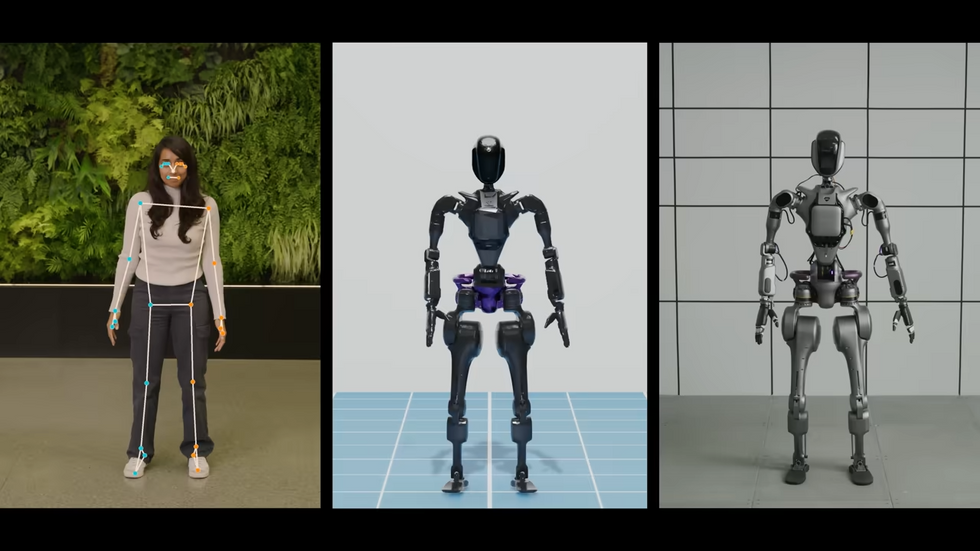
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfrute de los videos de hoy! Presentamos Human to Humanoid (H2O), un marco basado en aprendizaje por refuerzo (RL) que permite la teleoperación de todo el cuerpo en tiempo real de un robot humanoide de tamaño completo con solo una cámara RGB. Logramos con éxito la teleoperación de movimientos dinámicos de todo el cuerpo en escenarios del mundo real, incluidos caminar, saltar hacia atrás, patear, girar, saludar, empujar, boxear, etc. Hasta donde sabemos, esta es la primera demostración para lograr el aprendizaje. -Teleoperación humanoide de cuerpo entero en tiempo real.[ CMU ]Los robots con patas tienen el potencial de atravesar terrenos complejos y acceder a espacios reducidos más allá del alcance de las plataformas tradicionales gracias a su capacidad para seleccionar cuidadosamente puntos de apoyo y adaptar de manera flexible su postura corporal mientras caminan. Sin embargo, la implementación sólida en aplicaciones del mundo real sigue siendo un desafío abierto. En este artículo, presentamos un método para el control de la locomoción de las piernas utilizando aprendizaje por refuerzo y representaciones volumétricas 3D para permitir una locomoción robusta y versátil en entornos confinados y no estructurados.[ Takahiro Miki ]Claro, 3,3 metros por segundo es rápido para un humanoide, pero estoy más impresionado por los giros mientras camino escaleras abajo.[ Unitree ]Mejorar la seguridad de los manipuladores colaborativos requiere la reducción de la inercia en la parte móvil. Introducimos un enfoque novedoso en forma de un alineador de alambre 3D pasivo, que sirve como un mecanismo de transmisión de potencia liviano y de baja fricción, logrando así la baja inercia deseada en la operación del manipulador.[ SAQIEL ]Gracias, Temma!Robot Era acaba de lanzar Humanoid-Gym, un marco de aprendizaje por refuerzo de código abierto para humanoides bípedos. Como se puede ver en el vídeo, los algoritmos RL le han dado al robot, llamado Xiao Xing, o XBot, la capacidad de subir y bajar cajas apiladas al azar con relativa estabilidad y facilidad.[ Robot Era ]»Captura bimanual consciente del impacto de objetos de gran impulso». ¿Necesito decir mas?[ SLMC ]Más del 80% de los supervivientes de un accidente cerebrovascular experimentan dificultades para caminar, lo que afecta significativamente su vida diaria, su independencia y su calidad de vida en general. Ahora, una nueva investigación de la Universidad de Massachusetts Amherst amplía los límites de la recuperación de un accidente cerebrovascular con un exoesqueleto robótico de cadera único, diseñado como una herramienta de entrenamiento para mejorar la función de caminar. Esto invita a la posibilidad de nuevas terapias que sean más accesibles y más fáciles de trasladar de la práctica a la vida diaria, en comparación con los métodos de rehabilitación actuales.[ UMass Amherst ]¡Gracias, Julia! La manipulación aquí es bastante impresionante, pero es difícil saber qué tan impresionante sin saber también cuánto se aceleró el video.[ Somatic ]Los drones DJI trabajan para hacer del mundo un lugar mejor y una de las formas en que lo hacemos es a través del trabajo de conservación. Nos asociamos con Halo Robotics y OFI Orangutan Foundation International para mostrar cómo estos drones pueden generar un impacto.[ DJI ]El objetivo de la prueba es demostrar la extracción y sustitución de módulos satelitales en un formato CubeSat 27U utilizando el control de realidad aumentada de un robot. En este caso de uso, el satélite «cliente» se actualiza y reabastece de combustible utilizando componentes modulares. Luego, el robot retirará el módulo de computadora defectuoso y lo colocará en un dispositivo. Luego hará lo mismo con el tanque de propulsor. Luego, el robot los colocará correctamente nuevamente en el satélite.[ Extend Robotics ]Este video presenta algunos de los momentos más destacados y favoritos de los CYBATHLON Challenges 2024 que tuvieron lugar el 2 de febrero, mostrando tantos tipos diversos de tecnología de asistencia asumiendo tareas de disciplina y mostrando la tenacidad y determinación de los pilotos. Los Desafíos vieron nuevos equipos, nuevas tareas y nuevos formatos para muchas de las disciplinas de CYBATHLON.[ Cybathlon ]Ha sido un largo camino hacia los robots propulsados eléctricamente.[ ABB ]Pequeños drones para incendios forestales catastróficos (que cubren más de [40,470 hectares]) son como llevar una linterna para iluminar un campo de fútbol. Este breve vídeo describe los principales usos de los drones de todos los tamaños y por qué y cuándo se utilizan, o por qué no.[ CRASAR ]Probablemente no le sorprenda que haya muchos robots involucrados en la construcción de camiones y furgonetas Rivian.[ Kawasaki Robotics ]El programa Learning Introspective Control (LINC) de DARPA está desarrollando métodos de aprendizaje automático que son prometedores para acercar ese escenario a la realidad. LINC tiene como objetivo mejorar fundamentalmente la seguridad de los sistemas mecánicos, específicamente en vehículos terrestres, barcos, enjambres de drones y robótica, utilizando varios métodos que requieren una potencia informática mínima. El resultado es un controlador impulsado por IA del tamaño de un teléfono móvil.[ DARPA ]
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Desafíos de Cybathlon: 2 de febrero de 2024, ZURICHEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓN ¡Disfruta de los videos de hoy! ¿Es “más corresponsal” una palabra? Si no, debería serlo, porque este es el robot más astuto que he visto en mi vida.
[
ABS ]
GITAI se complace en anunciar que su sistema autónomo de brazo robótico dual (S2) de 1,5 metros de largo ha llegado con éxito a la Estación Espacial Internacional (ISS) a bordo del cohete SpaceX Falcon 9 (NG-20) para realizar una demostración externa de Servicio, ensamblaje y fabricación espacial (ISAM) mientras se encuentra a bordo de la ISS. El éxito de la demostración tecnológica del S2 será un hito importante para GITAI, ya que confirmará la viabilidad de esta tecnología como un sistema totalmente operativo en el espacio.
[
GITAI ]
Y si quieres cansarte en nombre de un robot, la carrera completa de 400 metros está a continuación.
[
Hybrid Robotics ]
El helicóptero Ingenuity Mars de la NASA superó los límites aerodinámicos durante los últimos meses de su misión, estableciendo nuevos récords de velocidad, distancia y altitud. Escuche al ingeniero jefe de Ingenuity, Travis Brown, explicar cómo los datos que recopiló el equipo podrían eventualmente usarse en futuros diseños de helicópteros.
[
NASA ]
BigDog: 15 años resolviendo problemas de movilidad a su manera.
[
Boston Dynamics ]
[Harvard School of Engineering and Applied Sciences] Los investigadores están ayudando a desarrollar viviendas extraterrestres y espaciales resilientes y autónomas mediante el desarrollo de tecnologías que permitan a los robots autónomos reparar o reemplazar componentes dañados en un hábitat. La investigación es parte del instituto Resilient ExtraTerrestrial Habitats (RETHi) dirigido por la Universidad Purdue, en asociación con [Harvard] SEAS, la Universidad de Connecticut y la Universidad de Texas en San Antonio. Su objetivo es “diseñar y operar hábitats resilientes en el espacio profundo que puedan adaptarse, absorber y recuperarse rápidamente de perturbaciones esperadas e inesperadas”.
[
Harvard SEAS ]
Investigadores de la Universidad de Ciencia y Tecnología de Huazhong (HUST) en un artículo reciente de T-RO describen y construyen un novedoso motor de articulación esférica de rigidez variable que permite un movimiento diestro y la flexibilidad de las articulaciones en omnidirecciones.
[
Paper ]
¡Gracias, Ram! Se nos dice que este nuevo robot de HEBI se llama «Mark Suckerberg» y que tienen en mente una aplicación muy interesante, que se revelará a finales de este año.
[
HEBI Robotics ]
¡Gracias, Dave! ¡Sumérgete en la primera edición de nuestra nueva clase de Robótica del Mundo Real en ETH Zürich! Nuestros estudiantes se embarcaron en un viaje increíble, creando sus manos robóticas con apariencia humana desde cero. En solo tres meses, los equipos diseñaron, construyeron y programaron sus manos robóticas impulsadas por tendones, ¡dominando la manipulación diestra con aprendizaje por refuerzo! ¿El resultado? Una espectacular muestra de innovación y habilidad durante nuestra gran final.
[
SRL ETHZ ]
Los investigadores de Carnegie Mellon han construido un sistema con un brazo robótico encima de un carro robótico RangerMini 2.0, para crear lo que llaman una plataforma para «movimiento y procesamiento inteligentes».
[
AgileX ]
Picassnake es nuestro robot hecho a medida que pinta cuadros a partir de música. Picassnake consta de un brazo y una cabeza, incrustados en un muñeco de serpiente de peluche. El robot está conectado a una computadora portátil para el control y procesamiento de música, que puede transmitirse a través de un micrófono o un archivo MP3. Para abrir la fuente de medios, un operador puede usar la interfaz gráfica de usuario o colocar un código QR de texto frente a una cámara web. Una vez que se abre la fuente de medios, Picassnake genera trazos únicos basados en la música y los traduce en movimiento físico para pintarlos sobre un lienzo.
[
Picassnake ]
En abril de 2021, el helicóptero Ingenuity Mars de la NASA se convirtió en la primera nave espacial en lograr un vuelo controlado y propulsado en otro mundo. Con 72 vuelos exitosos, Ingenuity ha superado con creces su demostración tecnológica originalmente planificada de hasta cinco vuelos. El 18 de enero, Ingenuity voló por última vez al Planeta Rojo. Únase a Tiffany Morgan, subdirectora del programa de exploración de Marte de la NASA, y Teddy Tzanetos, director del proyecto Ingenuity, mientras analizan estos vuelos históricos y lo que podrían significar para la futura exploración aérea extraterrestre.
[
NASA ]

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Cybathlon Challenges: 2 de febrero de 2024, ZURICHEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfruta de los vídeos de hoy! Puede que no estés familiarizado con Swiss-Mile, pero seguramente reconocerás su robot: es CUALQUIER animal con ruedas en los pies que puede hacer todo tipo de cosas increíbles. Swiss-Mile acaba de anunciar una ronda inicial para comercializar estas capacidades en plataformas cuadrúpedas, incluida la de Unitree, ¡lo que significa que es incluso asequible! Siempre es genial ver cómo la impresionante investigación en robótica avanza hacia la comercialización, y ya he comenzado a ahorrar para uno de estos míos.[ Swiss-Mile ]¡Gracias Marko! Este video presenta las capacidades del robot TALOS de PAL Robotics, ya que demuestra una marcha ágil y robusta utilizando referencias de control predictivo de modelo (MPC) enviadas a un controlador de dinámica inversa de cuerpo entero (WBID) desarrollado en colaboración con Dynamograde. Las imágenes muestran a TALOS navegando por varios terrenos desafiantes, incluidas escaleras y pendientes, mientras maneja perturbaciones inesperadas y peso adicional.[ PAL Robotics ]¡Gracias Lorna! ¿Quieres crear una espectacular demostración de manipulación bimanual? ¡Todo lo que necesitas es este sistema de teleoperación y una toma de cámara cuidadosamente recortada! Esto se basa en el sistema Mobile ALOHA de Stanford que presentamos en el video del viernes de la semana pasada.[ AgileX ]Wing todavía está tratando de hacer que la entrega con drones funcione, y tiene un dron nuevo y más grande para entregar aún más cosas a la vez.[ Wing ]Muchas investigaciones sobre robótica afirman ser sobre búsqueda y rescate y socorro en casos de desastre, pero realmente parece que ANYmal de RSL realmente puede lograrlo. Y aquí hay un video aún más impresionante, junto con algunos detalles sobre cómo funciona el sistema.[ Paper ]Esta podría ser la banda sonora más apropiada para un vídeo de robots que jamás haya escuchado. Las serpientes han cautivado durante mucho tiempo a los investigadores de robótica debido a su locomoción eficaz, su estructura corporal flexible y su capacidad para adaptar la fricción de su piel a diferentes terrenos. Si bien se han realizado extensas investigaciones sobre la locomoción serpentina, sigue habiendo un vacío en la exploración de la locomoción rectilínea como una solución robótica para navegar a través de espacios estrechos. En este estudio, describimos los principios fundamentales de la locomoción rectilínea y los aplicamos para diseñar un robot que se arrastra suave utilizando módulos de origami construidos con telas laminadas.[ SDU ]Escribimos sobre el innovador dron atado de Fotokite hace siete u ocho años, y es bueno ver que la compañía todavía está haciendo un trabajo sólido. Sin embargo, extraño la versión para el consumidor.[ Fotokite ][ JDP ] a través de [ Petapixel ]Este es SHIVAA, el robot recolector de fresas del Centro de Innovación de Robótica DFKI. El sistema se está desarrollando en el proyecto RoLand (Sistemas Robóticos en Agricultura), coordinado por el #RoboticsInnovationCenter (RIC) del DFKI Bremen. Dentro del proyecto diseñamos y desarrollamos un sistema móvil semiautónomo que es capaz de cosechar fresas independientemente de la interacción humana. [ DFKI ]El 6 de diciembre de 2023, Demarcus Edwards habló con estudiantes de robótica como orador en la serie de oradores universitarios sobre trayectorias y carreras en robótica, cuyo objetivo es responder a la pregunta: «¿Qué puedo hacer con un título en robótica?»[ Michigan Robotics ]Esta película, Loss of Sensation, se estrenó en Rusia en 1935. Parece ser la película que realmente irritó a Karel Čapek, porque convirtieron sus “robots” en seres mecánicos en lugar de biológicos.[ IMDB ]
Source link

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.IEEE SSRR 2023: 13–15 de noviembre de 2023, FUKUSHIMA, JAPÓNHumanoides 2023: 12–14 de diciembre de 2023, AUSTIN, TEXAS, EE. UU. Cybathlon Challenges: 02 de febrero de 2024, ZURICH, SUIZAEurobot Open 2024: 8–11 de mayo 2024, LA ROCHE-SUR-YON, FRANCIA¡Disfruta de los vídeos de hoy!Unitree B2: más allá del límite. Velocidad máxima de 6 m/s, carga sostenida de 40 kg y resistencia a la marcha sostenida de 5 h. ¡El rendimiento integral es de dos a tres veces mayor que el de los robots cuadrúpedos existentes en todo el mundo! ¡Adaptable a todos los terrenos, gran carga, resistencia duradera y rendimiento súper atlético! ¡Evoluciona, evoluciona y vuelve a evolucionar![ Unitree ]Este robot que cambia de forma se ha vuelto mucho más pequeño. En un nuevo estudio, ingenieros de la Universidad de Colorado Boulder presentaron mCLARI, un robot modular de 2 centímetros de largo que puede cambiar pasivamente su forma para pasar por espacios estrechos en múltiples direcciones. Pesa menos de un gramo pero puede soportar más de tres veces su peso corporal como carga útil adicional.[ CU Boulder ]Los investigadores de CMU utilizaron evidencia fósil para diseñar una réplica robótica blanda de pleurocistítidos, un organismo marino que existió hace casi 450 millones de años y se cree que fue uno de los primeros equinodermos capaces de moverse utilizando un tallo muscular.[ CMU ]Stretch ha movido más de un millón de cajas de clientes en menos de un año, mejorando la previsibilidad y previniendo lesiones. ¿Pero cómo llegamos allí? Descubra cómo utilizamos nuestra experiencia en investigación de robótica para diseñar, probar e implementar un robot de almacén. Partiendo de los componentes tecnológicos de Atlas, Stretch tiene la movilidad, la potencia y la inteligencia para automatizar los desafíos más difíciles de la industria.[ Boston Dynamics ]¿Qué hacen los robots en Halloween después de que todos se van? Únase a los robots de Ingenuity Labs en su aventura de pedir dulces. ¡Feliz Halloween![ Queens University ]¡Gracias, Josh! FreeLander es una plataforma de hardware de robot con patas modular y versátil con control neuronal adaptativo de inspiración biológica. La plataforma del robot se puede utilizar para construir diferentes robots con patas bioinspiradas. Cada módulo de la plataforma consta de dos patas diseñadas para funcionar como un robot de dos patas, que es capaz de caminar sobre un tubo metálico mediante pies electromagnéticos. Se pueden combinar múltiples módulos para obtener robots de seis y ocho patas para caminar en terrenos difíciles, como terrenos accidentados, pendientes, campos de pasos aleatorios, grava, pasto e incluso en tuberías.[ VISTEC ]¡Gracias Poramate! Energy Robotics espera que hayas pasado un Feliz Halloween![ Energy Robotics ]Este trabajo presenta un modelo de cámara para medios refractivos como el agua y su aplicación en odometría visual-inercial submarina. El modelo se autocalibra en tiempo real y no tiene correspondencias conocidas ni objetivos de calibración.[ ARL ]Los seres humanos explotan naturalmente la retroalimentación háptica durante tareas con mucho contacto, como cargar un lavavajillas o abastecer una estantería. Los sistemas robóticos actuales se centran en evitar contactos inesperados, a menudo apoyándose en sensores ambientales ubicados estratégicamente. En este artículo entrenamos una política de manipulación que explota los contactos en simulación para la tarea doméstica rica en contactos de cargar placas en un soporte ranurado, que se transfiere sin ningún ajuste fino al robot real.[ Paper ]¡Gracias Samarth! Se presenta aquí otro sistema complementario PAPRAS (Sistema de brazo robótico Plug-And-Play) diseñado para aumentar las funcionalidades del robot cuadrúpedo, Boston Dynamics Spot. El sistema integra hábilmente dos unidades PAPRAS en el Spot, inspirándose en la criatura mitológica Orthrus, un perro de dos cabezas en la mitología griega.[ KIMLAB ]Marwa Eldiwiny es estudiante de doctorado e investigadora de etapas iniciales (ESR) en la Vrije Universiteit Brussel, cuya investigación actual se centra en el modelado y la simulación de materiales blandos autorreparables para aplicaciones industriales. Su tesis de maestría fue «Tecnología anti-sigilo de UAV para una operación segura». Trabajó como ingeniera de investigación en Inria, Lille nord Europe, investigadora en el Instituto de Tecnología de Tartu y profesora del Programa de Mecatrónica y Robótica Industrial en la Universidad Minia, Egipto. Eldiwiny presenta el podcast IEEE RAS Soft Robotics, donde investigadores tanto del mundo académico como de la industria discuten los desarrollos recientes en el campo de investigación de Soft Robotics.[ SMART ITN ]3 laboratorios. Diferentes soluciones robóticas del futuro. Conozca a los amigos de las máquinas de CSAIL.[ MIT CSAIL ]Este seminario GRASP SFI de UPenn está a cargo de E Farrell Helbling en Cornell, sobre autonomía para robots a escala de insectos. Innumerables trabajos de ciencia ficción han establecido nuestras expectativas para robots pequeños, móviles y autónomos para su uso en una amplia gama de aplicaciones. La capacidad de moverse a través de entornos altamente dinámicos y complejos puede ampliar las capacidades en operaciones de búsqueda y rescate y tareas de inspección de seguridad. Estos robots también pueden formar un colectivo diverso para proporcionar más flexibilidad que un robot multifuncional. Presentaré mi trabajo sobre el análisis de los requisitos de control y potencia para este vehículo, así como los resultados sobre la integración de sensores a bordo. También discutiré los resultados recientes que culminan casi dos décadas de esfuerzos para crear un vehículo autónomo a escala de insecto. Por último, describiré cómo esta estrategia de diseño se puede aplicar fácilmente a otros robots autónomos micro y bioinspirados.[ UPenn ]
Source link