

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.ICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSSICSR 2024: 23–26 de octubre de 2024, ODENSE, DINAMARCACybathlon 2024: 25–27 de octubre de 2024, ZURICH ¡Disfruta de los vídeos de hoy! ¡Festo tiene abejas robot! Es un diseño muy inteligente, pero el tamaño me aterroriza de las abejas con las que Festo parece estar familiarizado.[ Festo ]¡Boing, boing, boing![ USC ]¿Por qué diablos te tomarías la molestia de programar un robot para que haga chips de batata y luego no devorarlos tú mismo?[ Dino Robotics ]Los robots móviles pueden transportar cargas útiles mucho mayores que su masa mediante la tracción de vehículos. Sin embargo, el terreno todoterreno presenta variaciones sustanciales en altura, pendiente y fricción, lo que puede provocar que la tracción se degrade o falle catastróficamente. Este artículo presenta un sistema que utiliza un manipulador multipropósito montado en un vehículo para adaptar físicamente el robot con anclajes únicos adecuados para un terreno particular para el transporte autónomo de carga útil.[ DART Lab ]Resulta que trabajar en una tarea colaborativa con un robot puede hacer que los humanos sean menos eficientes, porque tendemos a sobreestimar las capacidades del robot.[ CHI 2024 ]Wing publica un vídeo con el título «¿Cómo suenan los drones de Wing?», pero solo incluye un breve fragmento (aunque nada sin ruido de fondo) que revela a los espectadores y oyentes curiosos exactamente cómo suenan los drones de Wing. Porque, mira, un par de segundos de audio silenciado debajo de una voz en off en realidad no responde la pregunta. [ Wing ]Esta primera instancia de ROB 450 en el invierno de 2024 desafió a los estudiantes a sintetizar el conocimiento adquirido a través de sus cursos universitarios de Robótica en la Universidad de Michigan para utilizar un proceso de diseño y análisis sistemático e iterativo y aplicarlo para resolver un problema de Robótica real y abierto.[ Michigan Robotics ]Este seminario de Microsoft para futuros líderes en robótica e inteligencia artificial es de Catie Cuan en Stanford, sobre “Choreorobotics: enseñar a los robots a bailar con humanos”. A medida que los robots pasan de entornos industriales y de investigación a entornos cotidianos, los robots deben poder (1) aprender de los humanos mientras se beneficia de toda la gama de conocimientos humanos y (2) aprender a interactuar con los humanos de manera segura, intuitiva y social. Presentaré una serie de comportamientos convincentes de robots, donde la percepción y la interacción humanas están en primer plano en una variedad de tareas.[ UMD ]
Etiqueta: vídeo viernes Página 1 de 2


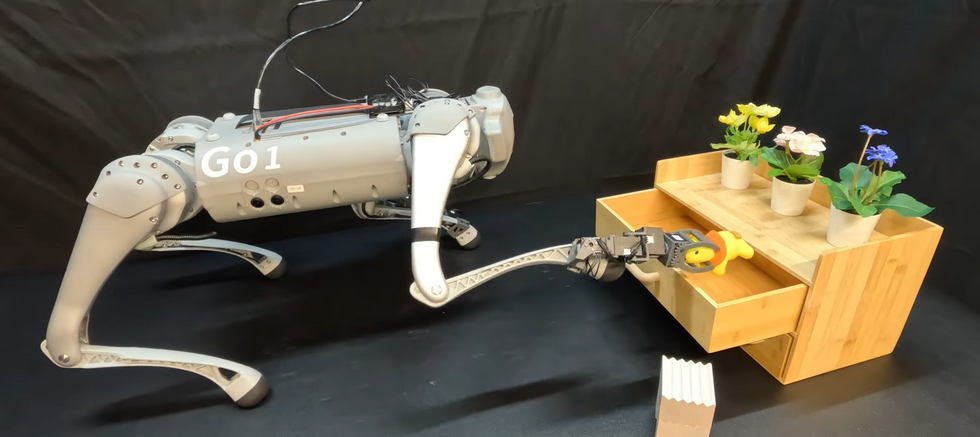
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSCybathlon 2024: 25-27 de octubre de 2024, ZÚRICH ¡Disfruta de los vídeos de hoy! En este trabajo, presentamos LocoMan, un diestro robot cuadrúpedo con una morfología novedosa para realizar manipulaciones versátiles en diversos entornos restringidos. Al equipar un robot Unitree Go1 con dos locomanipuladores modulares 3-DoF livianos y de bajo costo en sus pantorrillas delanteras, LocoMan aprovecha la movilidad y funcionalidad combinadas de las piernas y las pinzas para tareas de manipulación complejas que requieren un posicionamiento preciso en 6D del efector final. en un amplio espacio de trabajo.[ CMU ]¡Gracias, Changyi! La manipulación de objetos se ha estudiado ampliamente en el contexto de manipuladores móviles y de base fija. Sin embargo, la modalidad de locomoción sobreactuada empleada por los robots serpiente permite una combinación única de manipulación de objetos a través de la locomoción, conocida como locomanipulación. En este artículo, presentamos un enfoque de optimización para resolver el problema de manipulación locomotora basado en la planificación de rutas de contacto implícitas no impulsivas para nuestro robot serpiente COBRA.[ Silicon Synapse Lab ]Bien, pero donde ese disfraz tiene ojos no es donde Spot tiene ojos, por lo que Spot en el disfraz no puede ver, ¿verdad? Y ahora soy escéptico sobre la autenticidad del snoot-boop mutuo.[ Boston Dynamics ]Aquí hay un video de los robots de Field AI operando en entornos relativamente complejos y no estructurados sin mapas previos. ¡Asegúrate de leer nuestro artículo de esta semana para obtener más detalles![ Field AI ]¿Soy solo yo, o es un poco descabellado que los investigadores ahora publiquen artículos que comparan su controlador humanoide con el controlador humanoide del “fabricante”? Es como si los humanoides fueran una mercancía ahora o algo así.[ OSU ]Yo también estoy empacando armadura para ICRA.[ Pollen Robotics ]Honey Badger 4.0 es nuestra última plataforma robótica, creada específicamente para atravesar entornos hostiles y terrenos difíciles. Equipado con múltiples cámaras y sensores, se asegurará de que no se omita ningún defecto durante la inspección.[ MAB Robotics ]¡Gracias, Jakub! ¿Tiene una tarea de automatización que requiere la precisión y el torque de un brazo robótico industrial… pero necesita algo que sea más resistente o con un factor de forma no convencional? ¡Conozca el actuador HEBI Robotics serie H! Con 9 veces el torque de nuestra Serie X y una perfecta compatibilidad con el ecosistema HEBI para el desarrollo de robots, la Serie H abre un nuevo mundo de posibilidades para los robots.[ HEBI ]¡Gracias, Dave! Así es como ocurren todos los derrames en mi casa también: súper pasivo-agresivo.[ 1X ]El equipo de EPFL dirigido por el estudiante de doctorado Milad Shafiee, junto con los coautores Guillaume Bellegarda y el jefe del Laboratorio de BioRobótica Auke Ijspeert, han entrenado a un robot de cuatro patas utilizando aprendizaje de refuerzo profundo para navegar en terrenos desafiantes, logrando un hito tanto en robótica como en biología.[ EPFL ]En Agility fabricamos robots diseñados para trabajar. Nuestro robot Digit trabaja junto a nosotros en espacios pensados para las personas. Digit maneja las tareas tediosas y repetitivas propias de una máquina, lo que permite a las empresas y a su gente centrarse en el trabajo que requiere el elemento humano.[ Agility ]Con una gran cantidad de cifras increíbles y hechos destacados, aquí está Jan Jonsson, veterano de ABB Robotics, compartiendo su conocimiento y pasión por algunos de nuestros robots y controladores del pasado.[ ABB ][ Electric Sheep ]El Índice de IA, actualmente en su séptimo año, rastrea, recopila, destila y visualiza datos relacionados con la inteligencia artificial. El Índice proporciona datos imparciales, rigurosamente examinados y de origen global para que los formuladores de políticas, investigadores, periodistas, ejecutivos y el público en general desarrollen una comprensión más profunda del complejo campo de la IA. Dirigido por un comité directivo de influyentes líderes de opinión en IA, el Índice es el informe más completo del mundo sobre tendencias en IA. En este seminario, el gerente de investigación de HAI, Nestor Maslej, ofrece los aspectos más destacados del informe 2024, explicando las tendencias relacionadas con la investigación y el desarrollo, el desempeño técnico, la ética técnica de la IA, la economía, la educación, las políticas y la gobernanza, la diversidad y la opinión pública.[ Stanford HAI ]El seminario CMU RI de esta semana es de Dieter Fox en NVIDIA y UW, sobre «¿Dónde está RobotGPT?». En esta charla, discutiré enfoques para generar grandes conjuntos de datos para entrenar capacidades de manipulación de robots, con un enfoque en el papel que la simulación puede desempeñar en este contexto. . Mostraré algunos de nuestros trabajos anteriores, donde demostramos una transferencia sólida de simulación a real de habilidades de manipulación entrenadas en simulación, y luego presentaré un camino hacia la generación de conjuntos de demostración a gran escala que podrían ayudar a entrenar modelos robustos de manipulación de robots de mundo abierto.[ CMU ]


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSCybathlon 2024: 25-27 de octubre de 2024, ZURICH ¡Disfrute de los videos de hoy! El programa de Autonomía Robótica en Entornos Complejos con Resiliencia (RACER) de DARPA llevó a cabo recientemente su cuarto experimento (E4) para evaluar el rendimiento de vehículos no tripulados todoterreno. Estas pruebas, realizadas en Texas a finales de 2023, fueron la primera vez que el programa probó su nuevo vehículo, el RACER Heavy Platform (RHP). El vídeo muestra el seguimiento autónomo de rutas para pruebas y demostraciones de movilidad, incluidas visualizaciones de nubes de puntos de sensores. El RHP de 12 toneladas es significativamente más grande que los vehículos de flota RACER (RFV) de 2 toneladas que ya se utilizan en el programa. El uso de algoritmos en una plataforma muy diferente ayuda a RACER a lograr su objetivo de autonomía independiente de la plataforma de vehículos a escala de combate en entornos todoterreno complejos y relevantes para la misión que son significativamente más impredecibles que las condiciones en carretera.[ DARPA ]En nuestro nuevo artículo sobre Science Robotics, presentamos un sistema de navegación autónomo desarrollado para nuestros cuadrúpedos con ruedas, diseñado para una navegación rápida y eficiente dentro de grandes entornos urbanos. Impulsado por políticas de redes neuronales, nuestro sistema de control simple y unificado permite transiciones de marcha suaves, planificación de navegación inteligente y evitación de obstáculos con alta capacidad de respuesta en entornos urbanos poblados.[ Github ]La séptima generación de robots “Phoenix” incluye un rango de movimiento mejorado similar al humano. Las mejoras en el tiempo de actividad, la percepción visual y la detección táctil aumentan la capacidad del sistema para realizar tareas complejas durante períodos más largos. La iteración del diseño reduce significativamente el tiempo de construcción. La velocidad a la que se pueden automatizar nuevas tareas se ha multiplicado por 50, lo que marca un importante punto de inflexión en la velocidad de automatización de tareas.[ Sanctuary AI ]Estamos orgullosos de celebrar nuestra entrega comercial número un millón: un millón de entregas de sangre que salva vidas, vacunas críticas, comestibles de último momento y mucho más. ¿Pero la mejor parte? Este es solo el comienzo.[ Zipline ]¡Trabaja esas caderas![ RoMeLa ]Esto es algo aterrador y estoy fascinado.[ AVFL ]Proponemos un novedoso TWIMP humanoide, que combina un miembro superior musculoesquelético mimético humano con un péndulo invertido de dos ruedas. Combinando el beneficio de un humanoide musculoesquelético, que puede lograr un contacto suave con el entorno externo, y el beneficio de un péndulo invertido de dos ruedas con un tamaño pequeño y alta movilidad, podemos investigar fácilmente sistemas de control de aprendizaje en entornos con contacto y repentinos. Impacto. De Humanoides 2018.[ Paper ] a través de [ JSK Lab ]¡Gracias, Kento! Los Ballbots son excepcionalmente capaces de empujar sillas de ruedas, posiblemente mejores que las plataformas con patas, porque pueden moverse en cualquier dirección sin tener que reposicionarse.[ Paper ]Charge Robotics está construyendo robots que automatizan las partes de la construcción solar que requieren más mano de obra. La energía solar se ha convertido rápidamente en la forma más barata de generación de energía en muchas regiones. La demanda se ha disparado y ahora la principal barrera para instalarlo es la logística laboral y el ancho de banda. Nuestros robots eliminan el cuello de botella laboral, lo que permite a las empresas de construcción satisfacer la creciente demanda de energía solar y permitir que el mundo pase a las energías renovables más rápido.[ Charge Robotics ]Los robots que realizan ensamblajes de precisión son geniales y todo eso, pero esos clasificadores de tazones vibratorios parecen mágicos.[ FANUC ]El prototipo de robot del proyecto QUT CGRAS captura imágenes de corales bebés, destinados a la Gran Barrera de Coral, monitoreándolos y contándolos en tanques de cultivo. El equipo utiliza algoritmos de inteligencia artificial de última generación para detectar y contar automáticamente estos bebés de coral y realizar un seguimiento de su crecimiento a lo largo del tiempo, lo que ahorra tiempo y dinero al conteo humano.[ QUT ]Estamos realizando investigaciones para desarrollar sistemas aéreos no tripulados que ayuden en el monitoreo de incendios forestales. El entorno peligroso, dinámico y visualmente degradado de los incendios forestales da lugar a muchos desafíos de investigación fundamentales sin resolver.[ CMU ]Aquí hay un poco más de video de ese ascensor robótico, pero me pregunto por qué es tan lento: ¡sujeta esos robots allí y dispara el ascensor hacia arriba y hacia abajo![ NAVER ]En marzo de 2024, el Centro de Robótica y Biosistemas de la Universidad Northwestern demostró los robots colaborativos móviles Omnid (mocobots) en MARS, una conferencia en Ojai, California sobre aprendizaje automático, automatización, robótica y espacio, organizada por Jeff Bezos. El «enjambre» de mocobots está diseñado para colaborar con los humanos, permitiéndoles manipular fácilmente cargas útiles grandes, pesadas o incómodas. En este caso, los mocobots anulan el efecto de la gravedad, por lo que el humano puede manipular fácilmente el ala del avión simulado en seis grados de libertad. En general, los sistemas humano-cobot combinan lo mejor de las capacidades humanas con lo mejor de las capacidades de los robots.[ Northwestern ]Hay algo muy reconfortante en ver cómo una batería de litio se estropea y se quema durante 8 minutos.[ Hardcore Robotics ]EELS, o Exobiology Extant Life Surveyor, es un robot versátil con forma de serpiente diseñado para explorar terrenos que antes eran inaccesibles. Esta charla sobre EELS se presentó en la conferencia Amazon MARS de 2024.[ JPL ]La convergencia de la IA y la robótica desbloqueará un nuevo y maravilloso mundo de posibilidades en la vida cotidiana, dice la pionera en robótica e IA Daniela Rus. Profundizando en la forma en que piensan las máquinas, revela cómo las “redes líquidas” (una clase revolucionaria de IA que imita los procesos neuronales de organismos simples) podrían ayudar a las máquinas inteligentes a procesar información de manera más eficiente y dar lugar a una “inteligencia física” que permitirá a la IA operar más allá de los límites digitales y participar dinámicamente en el mundo real.[ TED ]

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, ALEMANIAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGOEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024 : 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los vídeos de hoy! En el proyecto SpaceHopper, estudiantes de ETH Zurich desarrollaron un robot capaz de moverse en entornos de baja gravedad mediante movimientos de salto. Está previsto que se utilice en futuras misiones espaciales para explorar pequeños cuerpos celestes. La exploración de asteroides y lunas podría proporcionar información sobre la formación del universo y pueden contener minerales valiosos que la humanidad podría utilizar en el futuro. El proyecto comenzó en 2021 como proyecto de enfoque ETH para estudiantes de licenciatura. Ahora continúa como un proyecto de investigación regular. Un desafío particular en el desarrollo de robots de exploración de asteroides es que, a diferencia de los cuerpos celestes más grandes como la Tierra, la gravedad de los asteroides y las lunas es baja. Por ello, los estudiantes probaron la funcionalidad de su robot en gravedad cero durante un vuelo parabólico. El vuelo parabólico se realizó en colaboración con la Agencia Espacial Europea como parte del Programa de Experimentos de la Academia de la ESA.[ SpaceHopper ]Todavía me resulta un poco extraño que ahora sea posible construir un robot como Menteebot. Dicho esto, en la actualidad parece que queda un largo camino por recorrer para poder realizar tareas de manera útil y confiable.[ Menteebot ]¡Mira, es el robot que todos queremos![ Github ]No estaba muy seguro de qué hacía que este edificio fuera especialmente “apto para robots” hasta que vi el ROBOT ELEVADOR DEDICADO.[ NAVER ]Nos complace anunciar las últimas actualizaciones de nuestro robot humanoide CL-1. En la prueba, demuestra cómo subir escaleras con una sola zancada basándose en la percepción del terreno en tiempo real. ¡Por primera vez, CL-1 logra correr de un lado a otro, de una manera estable y dinámica![ LimX Dynamics ]EEWOC [Extended-reach Enhanced Wheeled Orb for Climbing] utiliza un esquema de locomoción único para escalar estructuras de acero complejas con sus pinzas magnéticas. Su extremidad con resorte de cinta, liviana y altamente extensible, puede alcanzar más de 1,2 metros, lo que le permite atravesar huecos y obstáculos mucho más grandes que otros robots de escalada existentes. Su capacidad para doblarse le permite alcanzar esquinas y repisas, y puede pasar fácilmente de una superficie a otra gracias a la ayuda de sus ruedas. Las ruedas también le permiten conducir de forma más rápida y eficiente sobre el terreno. Estas características hacen que EEWOC sea ideal para escalar las complejas estructuras de acero que se ven en entornos del mundo real.[ Paper ]Gracias a sus “sensores de contacto con las nalgas”, el humanoide musculoesquelético de JSK ha dominado (más o menos) el patinete en silla.[ University of Tokyo ]¡Gracias, Kento! La fisioterapia parece una gran aplicación para un robot humanoide cuando realmente no necesitas que ese robot humanoide haga mucho.[ Fourier Intelligence ]El helicóptero Ingenuity Mars de la NASA se convirtió en el primer vehículo en lograr un vuelo controlado y propulsado en otro planeta cuando surcó los cielos marcianos el 19 de abril de 2021. Este vídeo mapea la ubicación de los 72 vuelos que realizó el helicóptero a lo largo de casi tres años. El ingenio superó con creces las expectativas: se elevó más alto y más rápido de lo que se imaginaba anteriormente.[ JPL ]¡No gracias![ Paper ]MERL presenta una nueva tecnología de ensamblaje robótico autónomo, que ofrece una visión inicial de cómo funcionarán los robots en las fábricas del futuro. A diferencia de los enfoques convencionales en los que los humanos establecen condiciones previas para el montaje, nuestra tecnología permite a los robots adaptarse a diversos escenarios. Mostramos el ensamblaje autónomo de una caja de cambios que se demostró en vivo en CES2024.[ Mitsubishi ]¡Gracias, Devesh! En noviembre de 2023, Digit se implementó en un centro de distribución descargando contenedores de un AMR como parte de las operaciones regulares de la instalación, incluido un turno durante el Cyber Monday.[ Agility ]El PR2 simplemente se niega a morir. La última vez que lo verifiqué, ¡el soporte oficial cesó en 2016![ University of Bremen ]El programa Air Combat Evolution (ACE) de DARPA ha logrado las primeras pruebas en el aire de algoritmos de IA que vuelan de forma autónoma un avión de combate contra un avión de combate pilotado por humanos en escenarios de combate dentro del alcance visual (a veces denominados «peleas de perros») En este video, los miembros del equipo analizan qué diferencia al programa ACE de otros proyectos de autonomía aeroespacial y cómo representa un momento transformador en la historia aeroespacial, estableciendo una base para una colaboración ética y confiable entre humanos y máquinas para aplicaciones militares y civiles complejas. [ DARPA ]A veces, los robots que existen para un solo propósito y que solo logran con éxito moderado mientras se esfuerzan mucho son los mejores robots.[ CMU ]


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, ALEMANIAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGOEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024 : 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS Cybathlon 2024: 25–27 de octubre de 2024, ZURICH ¡Disfruta de los vídeos de hoy! Creo que sugerir que los robots no pueden caer es mucho menos útil que sugerir que Los robots pueden caerse y volver a levantarse rápida y fácilmente.[ Deep Robotics ]Sanctuary AI dice que este video muestra a Phoenix operando a «velocidad equivalente a la humana», pero no especifican qué humano ni bajo qué condiciones. Aunque es más rápido de lo que yo sería, eso es seguro.[ Sanctuary AI ]“Suzume” es una película de animación de Makoto Shinkai, en la que uno de los personajes se convierte en una silla de tres patas: Shintaro Inoue del JSK Lab de la Universidad de Tokio ha conseguido construir una versión robótica de esa misma silla, que es muy impresionante:[ Github ]¡Gracias, Shintaro! El robot humanoide EVE entrena para ayudar en el hogar, como poner la compra en los gabinetes de la cocina.[ 1X ]Este es el RAM: cortacésped autónomo robótico. Se puede dejar caer en cualquier parte del mundo y se despertará con la misión de acortar la hierba alta que lo rodea. Aquí hay un breve clip de cómo funciona en el Presidio en SF.[ Electric Sheep ]Este año, nuestros robots afrontaron el invierno finlandés por primera vez. A medida que la nieve se aclara y los días se alargan, recordamos cómo nuestros robots realizaron miles de entregas a clientes de S Group durante los meses más fríos.[ Starship ]Agility Robotics está haciendo todo lo posible para responder a la (muy común) pregunta de «Está bien, pero ¿qué pueden hacer realmente los robots humanoides?»[ Agility Robotics ]Digit es genial y todo eso, pero Cassie siempre será uno de mis robots favoritos.[ CoRIS ]La adopción de cámaras de campo de visión (FoV) omnidireccionales en robots aéreos mejora enormemente la capacidad de percepción, lo que mejora significativamente las capacidades de la robótica aérea en tareas de inspección, reconstrucción y rescate. Proponemos OmniNxt, una plataforma de robótica aérea de código abierto con percepción omnidireccional.[ OmniNxt ]El marco MAkEable mejora la manipulación móvil en entornos diseñados en torno a humanos al agilizar el proceso de compartir habilidades y experiencias aprendidas entre diferentes robots y contextos. Las pruebas prácticas confirman su eficacia en diversos escenarios, en los que participan diferentes robots, en tareas como la captura de objetos, el uso coordinado de ambas manos en tareas y el intercambio de habilidades entre robots humanoides.[ Paper ]Realizamos pruebas de Ringbot al aire libre en una pista de 400 metros. Con una fuente de energía de 2300 miliamperios-hora y 11,1 voltios, Ringbot logró recorrer aproximadamente 3 kilómetros en 37 minutos. Controlamos su velocidad y dirección objetivo utilizando un controlador de joystick remoto (Steam Deck), y Ringbot experimentó cinco caídas durante esta prueba.[ Paper ]Hay una notable falta de coherencia sobre dónde exactamente Boston Dynamics quiere que pienses que están los ojos de Spot.[ Boston Dynamics ]Al igual que con cada video de cocina, se requiere mucha preparación en segundo plano para que este robot cocine una comida completa, pero demolería por completo esas papas fritas.[ Dino Robotics ]Aquí encontrará todo lo que necesita saber sobre los drones de entrega Wing, excepto cuánto tiempo humano realmente requieren y el costo real de realizar entregas mediante drones, porque no es divertido hablar de esas cosas.[ Wing ]Esta conferencia en memoria de CMU Teruko Yata está a cargo de Jonathan Hurst de Agility Robotics, sobre «Robots centrados en el ser humano y cómo el aprendizaje permite la generalidad». Los humanos siempre han soñado con robots ayudantes. La novedad es que este sueño se está haciendo realidad. Los nuevos avances en IA, basados en hardware y dinámica pasiva, permiten una generalidad enormemente mejorada. Los robots pueden salir de entornos altamente estructurados y centrarse más en el ser humano: operar en espacios humanos, interactuar con personas y realizar algunos flujos de trabajo humanos básicos. Al conectar un modelo de lenguaje grande, Digit puede convertir solicitudes de alto nivel en lenguaje natural en instrucciones complejas de robot, componiendo la biblioteca de habilidades en conjunto, utilizando el contexto humano para lograr un trabajo real en el mundo humano. Todo esto es nuevo y nunca volverá atrás: la IA impulsará una rápida revolución robótica que cambiará la forma en que vivimos.[ CMU ]


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, ALEMANIAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGOEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024 : 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los videos de hoy!USC, UPenn, Texas A&M, Oregon State, Georgia Tech, Temple University y NASA Johnson Space Center están enseñando como perros robots para navegar por los cráteres de la luna y otras superficies planetarias desafiantes en una investigación financiada por la NASA.[ USC ]AMBIDEX es un robot revolucionario que es rápido, liviano y capaz de realizar una manipulación similar a la de un humano. Hemos añadido un sensor en la cabeza, el torso y la cintura para ampliar enormemente el rango de movimiento. En comparación con la versión anterior centrada en el brazo, la impresión general y el equilibrio han cambiado por completo.[ Naver Labs ]Todavía necesita mucho trabajo, pero el polinizador de seis brazos, Stickbug, ahora puede navegar y polinizar flores de forma autónoma en un invernadero. Creo que «necesita mucho trabajo» en realidad significa «necesita un par de brazos más».[ Paper ]¡Experimente el futuro de la robótica mientras el robot humanoide de UBTECH se integra con ERNIE de Baidu a través de AppBuilder! Robots testigo [that] comprender el lenguaje y realizar de forma autónoma tareas como doblar ropa y clasificar objetos.[ UBTECH ]Sé que las aletas de este robot son para caminar bajo el agua en lugar de en tierra, pero al verlo moverse, siento que está destinado a evolucionar hacia algo un poco más terrestre.[ Paper ] a través de [ HERO Lab ]Además, si es propietario de un robot aspirador, recuerde limpiarlo de vez en cuando. Aquí se explica cómo hacerlo con un Roomba:[ iRobot ]El vídeo muestra las pruebas de cuenca de olas de un vehículo submarino anfibio no tripulado de hélice cicloidal (Cyclo-UUV) de 43 kg (95 lb) desarrollado en el Laboratorio Avanzado de Vuelo Vertical de la Universidad Texas A&M. El uso de ciclohélices permite una vectorización de empuje de 360 grados para una controlabilidad dinámica más robusta en comparación con los UUV con hélices de tornillo convencionales.[ AVFL ]Sony todavía está actualizando Aibo con nuevas funciones, como la capacidad de escuchar tu terrible música y bailar.[ Aibo ]Operar robots con precisión y a altas velocidades ha sido un objetivo de larga data de la investigación en robótica. Para permitir movimientos dinámicos precisos y seguros, presentamos un brazo robótico impulsado por tendones de cuatro grados de libertad (DoF). Los tendones permiten colocar la actuación en la base para reducir la inercia del robot, lo que demostramos que reduce significativamente las fuerzas máximas de colisión en comparación con los sistemas convencionales impulsados por motor. Emparejar nuestro robot con músculos neumáticos permite generar altas fuerzas y movimientos altamente acelerados, mientras se beneficia de la resistencia al impacto a través de la conformidad pasiva.[ Max Planck Institute ]Los rovers en Marte anteriormente quedaron atrapados en suelos sueltos, y al girar las ruedas los excavaron más profundamente, como un automóvil atrapado en la arena. Para evitar esto, Rosalind Franklin cuenta con un exclusivo modo de locomoción sobre ruedas para superar terrenos difíciles, así como un software de navegación autónomo.[ ESA ]Cassie puede caminar sobre arena, grava y rocas dentro del Robot Playground de la Universidad de Michigan. Vaya, se detuvieron antes de llegar a las rocas divertidas.[ Paper ] a través de [ Michigan Robotics ]Nada mal para 2016, ¿verdad?[ Namiki Lab ]MOMO ha aprendido los movimientos de baile de Bam Yang Gang con su destreza manual. 🙂 Al analizar videos de danza en 2D, extraemos datos detallados del esqueleto de la mano, lo que nos permite recrear los movimientos en 3D usando un modelo de mano. Con esta información, MOMO replica los movimientos de baile con las articulaciones de sus brazos y manos.[ RILAB ] a través de [ KIMLAB ]Este seminario GRASP SFI de UPenn es de Eric Jang de 1X Technologies, sobre «Motores de datos para robots humanoides». La misión de 1X es crear un suministro abundante de trabajo físico a través de androides que trabajan junto a los humanos. Compartiré algunos de los avances que 1X ha realizado hacia la manipulación móvil de uso general. Hemos ampliado la cantidad de tareas que nuestros androides pueden realizar combinando una estrategia de aprendizaje de un extremo a otro con un sistema sin código para agregar nuevas capacidades robóticas. Nuestro equipo de operaciones de Android entrena sus propios modelos con los datos que ellos mismos recopilan, lo que produce un conjunto de datos «de la granja a la mesa» de muy alta calidad que se puede utilizar para aprender comportamientos extremadamente capaces. También compartiré un avance del progreso que hemos estado logrando hacia un “modelo mundial” generalista para robots humanoides.[ UPenn ]Este seminario de Microsoft para futuros líderes en robótica e inteligencia artificial es de Chahat Deep Singh de la Universidad de Maryland, sobre «Percepción mínima: habilitación de la autonomía en robots del tamaño de la palma de la mano». La solución a la autonomía de los robots se encuentra en la intersección de la inteligencia artificial, la visión por computadora y imágenes y robótica, lo que da como resultado robots mínimos. Esta charla explora el desafío de desarrollar un marco de percepción mínima para robots diminutos (menos de 6 pulgadas) utilizados en operaciones de campo, como inspecciones espaciales en espacios confinados y polinización por robots. Además, profundizaremos en el ámbito de la percepción selectiva, la IA incorporada y el futuro de la autonomía del robot en la palma de tu mano.[ UMD ]
Source link


Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.RoboCup German Open: 17–21 de abril de 2024, KASSEL, GERMANYAUVSI XPONENTIAL 2024: 22–25 de abril de 2024, SAN DIEGO, CAEurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS¡Disfruta de los vídeos de hoy! Los ingenieros de Columbia construyen Emo, una cara robótica revestida de silicio que establece contacto visual y utiliza dos modelos de IA para anticipar y replicar la sonrisa de una persona antes de que realmente sonría: un avance importante en los robots que predicen con precisión las expresiones faciales humanas, mejoran las interacciones y generan confianza entre humanos y robots.[ Columbia ]Investigadores de la Universidad de Stanford han inventado una forma de aumentar los motores eléctricos para hacerlos mucho más eficientes a la hora de realizar movimientos dinámicos a través de un nuevo tipo de actuador, un dispositivo que utiliza energía para hacer que las cosas se muevan. Su actuador, publicado el 20 de marzo en Science Robotics, utiliza resortes y embragues para realizar una variedad de tareas con una fracción del uso de energía de un motor eléctrico típico.[ Stanford ]Lo siento, pero el mundo no necesita más bateristas.[ Fourier Intelligence ]Siempre es bueno ver a Valakyrie de la NASA realizando investigaciones.[ NASA ]En terrenos desafiantes, la construcción de estructuras como antenas y mástiles de teleféricos a menudo requiere el uso de helicópteros para transportar cargas mediante cuerdas. Desafiando este paradigma, presentamos Geranos: un vehículo aéreo no tripulado (UAV) multirotor especializado diseñado para mejorar el transporte y el ensamblaje aéreos. . Nuestra demostración experimental que imita las instalaciones de mástiles de antenas/teleféricos muestra la capacidad de Gerano para apilar postes (3 kilogramos, 2 metros de largo) con una notable precisión de colocación inferior a 5 centímetros, sin necesidad de intervención manual humana.[ Paper ]Elios 2 de Flyability en noviembre de 2020 ayudó a los investigadores a inspeccionar el reactor 5 en el lugar del desastre nuclear de Chernobyl para determinar si había uranio presente en el área. Hasta entonces, el reactor 5 no había sido investigado desde el desastre de 1986.[ Flyability ]Hasta ahora se han desarrollado varios humanoides musculoesqueléticos. Si bien estos humanoides tienen la ventaja de sus cuerpos flexibles y redundantes que imitan el cuerpo humano, todavía están lejos de ser aplicados a tareas del mundo real. Una de las razones de esto es la dificultad de caminar bípedo en un cuerpo flexible. Por lo tanto, desarrollamos un robot musculoesquelético con ruedas, Musashi-W, combinando una base con ruedas y extremidades superiores musculoesqueléticas para aplicaciones del mundo real.[ Paper ]¡Gracias, Kento! Una tendencia reciente en robótica industrial es tener manipuladores robóticos trabajando lado a lado con operadores humanos. Un aspecto desafiante de esta coexistencia es que se requiere que el robot resuelva de manera confiable problemas complejos de planificación de rutas en un entorno que cambia dinámicamente. Para garantizar la seguridad del operador humano y al mismo tiempo lograr la realización eficiente de la tarea, este documento presenta… un esquema [that] puede dirigir el brazo del robot a la postura de efector final deseada en presencia de saturación del actuador, rangos articulares limitados, límites de velocidad, un entorno de obstáculos estáticos desordenado y colaboradores humanos en movimiento.[ Paper ]¡Gracias, Kelly! Nuestro manipulador móvil Digit trabajó de forma continua durante 26 horas divididas en los 3,5 días de Modex 2024, en Atlanta. Todo fue rastreado y coordinado por nuestro producto más nuevo, Agility Arc, una plataforma de automatización en la nube.[ Agility ]Estamos construyendo robots que pueden mantener a las personas fuera de peligro: Spot permite a los operadores investigar y reducir situaciones peligrosas de forma remota. Los robots se han utilizado en aplicaciones gubernamentales y de seguridad pública durante décadas, pero la movilidad inigualable y la interfaz intuitiva de Spot están cambiando la respuesta a incidentes de los departamentos en el campo hoy en día.[ Boston Dynamics ]Este artículo presenta un robot transformador aéreo biestable (BAT), un novedoso vehículo aéreo híbrido (HAV) transformable que cambia entre los modos cuadrotor y ala fija mediante una rápida aceleración y sin ninguna actuación adicional más allá de las necesarias para el vuelo normal.[ Paper ]Baymax de Disney suele ser el centro de atención en muchas presentaciones de investigación dedicadas a la interacción física humano-robot (pHRI) suave y segura. El reciente artículo de KIMLAB en TRO muestra un paso hacia la realización del concepto Baymax al envolver los esqueletos de PAPRAS (Sistema de brazo robótico Plug And Play) con pieles suaves y utilizarlas para funciones sensoriales.[ Paper ]Atrápame si puedes![ CVUT ]El aprendizaje por refuerzo profundo (RL) ha demostrado resultados impresionantes en la resolución de tareas robóticas complejas, como la locomoción cuadrúpeda. Sin embargo, los solucionadores actuales no logran producir políticas eficientes que respeten restricciones estrictas. En este trabajo, abogamos por la integración de restricciones en el aprendizaje de robots y presentamos Restricciones como terminaciones (CaT), un novedoso algoritmo de RL restringido.[ CaT ]¿Por qué el sueño de tener un robot en casa que haga tus tareas aún no se ha hecho realidad? Con tres décadas de experiencia en investigación en este campo, el robótico Ken Goldberg arroja luz sobre la cruda verdad sobre los robots y lo que se necesitará para construir máquinas más diestras para trabajar en un almacén o ayudar en casa.[ TED ]Diseñado como una demostración de tecnología que permitiría realizar hasta cinco vuelos de prueba experimentales en un lapso de 30 días, el helicóptero de Marte superó las expectativas (repetidamente) y recientemente completó su misión después de haber registrado la increíble cantidad de 72 vuelos durante casi tres años. Únase a nosotros para una charla en vivo para aprender cómo el equipo de Ingenuity utilizó el ingenio y la creatividad para transformar el helicóptero de una demostración tecnológica exitosa en un útil explorador para el rover Perseverance, demostrando en última instancia el valor de la exploración aérea para futuras misiones interplanetarias.[ JPL ]Únase a nosotros para una animada mesa redonda con los miembros de la facultad GRASP, el Dr. Pratik Chaudhari, el Dr. Dinesh Jayaraman y el Dr. Michael Posa. Este panel será moderado por el Dr. Kostas Daniilidis en torno al tema candente actual de la IA incorporada en la robótica.[ Penn Engineering ]
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOSDisfrute de los videos de hoy !Vea el viaje de NVIDIA desde ser pionero en hardware avanzado para vehículos autónomos y herramientas de simulación hasta percepción y manipulación aceleradas para robots móviles autónomos y brazos industriales, culminando en la próxima ola de IA de vanguardia para robots humanoides.[ NVIDIA ]En la versión 4.0, mejoramos las habilidades de locomoción de Spot gracias al poder del aprendizaje por refuerzo. Paul Domanico, ingeniero en robótica de Boston Dynamics, habla de cómo el enfoque híbrido de Spot de combinar el aprendizaje por refuerzo con el control predictivo del modelo crea un robot aún más estable en los entornos más antagónicos.[ Boston Dynamics ]Estamos entusiasmados de compartir nuestro último progreso en la enseñanza de habilidades de propósito general a los EVE. Todo en el video es autónomo, todo a velocidad 1X, todo controlado con un único conjunto de pesos de red neuronal.[ 1X ]Lo que encuentro interesante acerca de que el Unitree H1 haga un giro de pie es dónde decide poner sus piernas.[ Unitree ]En la Exposición MODEX de marzo de 2024, Pickle Robot demostró cómo recoger carga de una pila aleatoria similar a lo que se ve en un remolque de camión desordenado después de haber rebotado durante muchos kilómetros de carretera. Las pilas de cajas nunca volvieron a ser las mismas y la manifestación se realizó en vivo frente a una multitud de espectadores 25 veces durante 4 días. Ningún otro sistema robótico de descarga de contenedores o remolques ha demostrado todavía esta capacidad de recoger pilas no estructuradas.[ Pickle ]RunRu es un robot parecido a un coche, un coche parecido a un robot, con autonomía, sociabilidad y operatividad. Se trata de un nuevo tipo de vehículo personal que pretende crear una relación “Jinba-Ittai” con sus pasajeros, que no sólo son siempre asertivos, sino que a veces también se quejan.[ ICD-LAB ]Verdie fue al GTC este año y se ganó el corazón de la gente, pero tal vez no el de los otros robots.[ Electric Sheep ]“DEEPRobotics AI+” combina capacidades de IA con sistemas de software robóticos para impulsar continuamente la inteligencia incorporada. El logro mostrado es el resultado del entrenamiento de un nuevo sistema de software e inteligencia artificial.[ DEEP Robotics ]Si desea recopilar datos para el agarre del robot, usar Stretch y un par de pinzas es lo más asequible posible.[ Hello Robot ]La verdadera razón por la que las piernas de Digit miran hacia atrás es para que no se golpee las espinillas al sacar las GPU del horno. Mientras tanto, algunos de nosotros podemos hornear nuestras GPU sin siquiera necesitar un horno.[ Agility ]P1 es el innovador robot bípedo de pie puntiagudo de LimX Dynamics, que sirve como una plataforma importante para el desarrollo sistemático y las pruebas modulares del aprendizaje por refuerzo. Se utiliza para avanzar en la investigación y la iteración de las habilidades básicas de locomoción bípeda. El éxito de P1 en la conquista del terreno forestal es un testimonio de la investigación y el desarrollo sistemático de LimX Dynamics en el aprendizaje por refuerzo.[ LimX ]Y ahora, esto.[ Suzumori Endo Lab ]Cocinar en las cocinas es divertido. ¡PERO hacerlo en colaboración con dos robots es aún más satisfactorio! Presentamos MOSAIC, un marco modular que coordina múltiples robots para colaborar estrechamente y cocinar con los humanos a través de la interacción del lenguaje natural y un depósito de habilidades.[ Cornell ]neoDavid es un humanoide robusto con diestras habilidades de manipulación, desarrollado en DLR. El objetivo principal en el desarrollo de neoDavid es acercarse lo más posible a las capacidades humanas, especialmente en términos de dinámica, destreza y robustez.[ DLR ]Bienvenido a nuestra serie de videos destacados para clientes donde mostramos algunos de los robots notables en los que nuestros clientes han estado trabajando. En este episodio, mostramos tres UGV de Clearpath Robotics que nuestros clientes utilizan para crear asistentes robóticos para tres aplicaciones diferentes.[ Clearpath ]Este vídeo presenta la nueva mano robótica de tres dedos de KIMLAB, que cuenta con sensores táctiles suaves para mejorar las capacidades de agarre. Aprovechando materiales de impresión 3D rentables, garantiza robustez y eficiencia operativa.[ KIMLAB ]Varios enfoques de planificación conscientes de la percepción han intentado mejorar la precisión de la estimación del estado durante las maniobras, mientras que a menudo se ha pasado por alto la compatibilidad de características entre marcos, un factor crucial que influye en la precisión de la estimación. En este artículo, presentamos APACE, un marco de generación de trayectorias ágil y consciente de la percepción para vuelos agresivos con quadrotores, que tiene en cuenta la compatibilidad de características durante la planificación de trayectorias.[ Paper ] a través de [ HKUST ]En este vídeo, vemos a Samuel Kunz, el piloto del equipo RSL Assistance Robot Race de ETH Zurich, mientras participa en los CYBATHLON Challenges 2024. Samuel completó las cuatro tareas designadas: recuperar un paquete de un buzón, usar un cepillo de dientes, colgar una bufanda en un tendedero y vaciar un lavavajillas, con la ayuda de un robot asistente. Logró una puntuación perfecta de 40 sobre 40 puntos y consiguió el primer puesto en la carrera, completando las tareas en 6,34 minutos.[ CYBATHLON ]Florian Ledoux es un fotógrafo de vida silvestre con un profundo amor por el Ártico y su vida silvestre. Usando el Mavic 3 Pro, pisa el hielo listo para capturar la belleza pura y las historias de este lugar frío y remoto.[ DJI ]
Source link
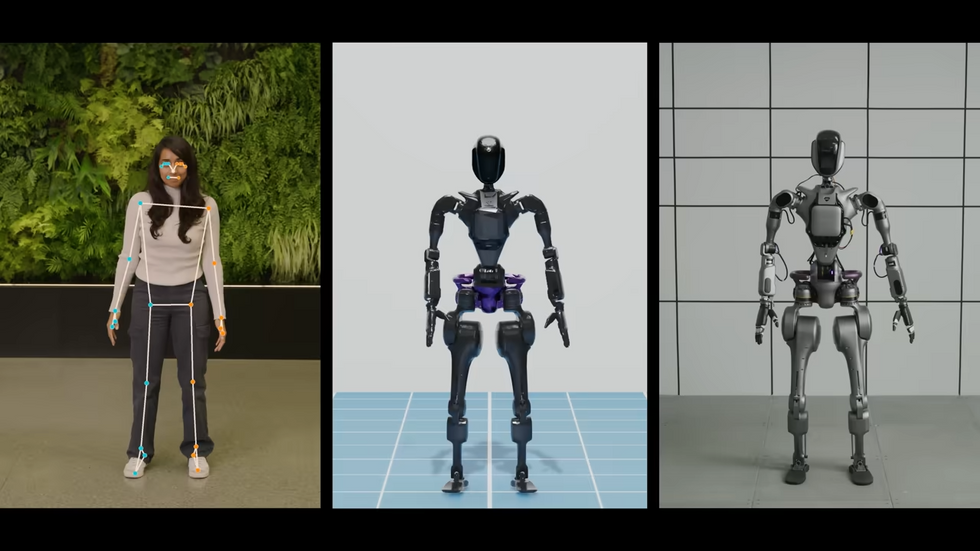
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfrute de los videos de hoy! Presentamos Human to Humanoid (H2O), un marco basado en aprendizaje por refuerzo (RL) que permite la teleoperación de todo el cuerpo en tiempo real de un robot humanoide de tamaño completo con solo una cámara RGB. Logramos con éxito la teleoperación de movimientos dinámicos de todo el cuerpo en escenarios del mundo real, incluidos caminar, saltar hacia atrás, patear, girar, saludar, empujar, boxear, etc. Hasta donde sabemos, esta es la primera demostración para lograr el aprendizaje. -Teleoperación humanoide de cuerpo entero en tiempo real.[ CMU ]Los robots con patas tienen el potencial de atravesar terrenos complejos y acceder a espacios reducidos más allá del alcance de las plataformas tradicionales gracias a su capacidad para seleccionar cuidadosamente puntos de apoyo y adaptar de manera flexible su postura corporal mientras caminan. Sin embargo, la implementación sólida en aplicaciones del mundo real sigue siendo un desafío abierto. En este artículo, presentamos un método para el control de la locomoción de las piernas utilizando aprendizaje por refuerzo y representaciones volumétricas 3D para permitir una locomoción robusta y versátil en entornos confinados y no estructurados.[ Takahiro Miki ]Claro, 3,3 metros por segundo es rápido para un humanoide, pero estoy más impresionado por los giros mientras camino escaleras abajo.[ Unitree ]Mejorar la seguridad de los manipuladores colaborativos requiere la reducción de la inercia en la parte móvil. Introducimos un enfoque novedoso en forma de un alineador de alambre 3D pasivo, que sirve como un mecanismo de transmisión de potencia liviano y de baja fricción, logrando así la baja inercia deseada en la operación del manipulador.[ SAQIEL ]Gracias, Temma!Robot Era acaba de lanzar Humanoid-Gym, un marco de aprendizaje por refuerzo de código abierto para humanoides bípedos. Como se puede ver en el vídeo, los algoritmos RL le han dado al robot, llamado Xiao Xing, o XBot, la capacidad de subir y bajar cajas apiladas al azar con relativa estabilidad y facilidad.[ Robot Era ]»Captura bimanual consciente del impacto de objetos de gran impulso». ¿Necesito decir mas?[ SLMC ]Más del 80% de los supervivientes de un accidente cerebrovascular experimentan dificultades para caminar, lo que afecta significativamente su vida diaria, su independencia y su calidad de vida en general. Ahora, una nueva investigación de la Universidad de Massachusetts Amherst amplía los límites de la recuperación de un accidente cerebrovascular con un exoesqueleto robótico de cadera único, diseñado como una herramienta de entrenamiento para mejorar la función de caminar. Esto invita a la posibilidad de nuevas terapias que sean más accesibles y más fáciles de trasladar de la práctica a la vida diaria, en comparación con los métodos de rehabilitación actuales.[ UMass Amherst ]¡Gracias, Julia! La manipulación aquí es bastante impresionante, pero es difícil saber qué tan impresionante sin saber también cuánto se aceleró el video.[ Somatic ]Los drones DJI trabajan para hacer del mundo un lugar mejor y una de las formas en que lo hacemos es a través del trabajo de conservación. Nos asociamos con Halo Robotics y OFI Orangutan Foundation International para mostrar cómo estos drones pueden generar un impacto.[ DJI ]El objetivo de la prueba es demostrar la extracción y sustitución de módulos satelitales en un formato CubeSat 27U utilizando el control de realidad aumentada de un robot. En este caso de uso, el satélite «cliente» se actualiza y reabastece de combustible utilizando componentes modulares. Luego, el robot retirará el módulo de computadora defectuoso y lo colocará en un dispositivo. Luego hará lo mismo con el tanque de propulsor. Luego, el robot los colocará correctamente nuevamente en el satélite.[ Extend Robotics ]Este video presenta algunos de los momentos más destacados y favoritos de los CYBATHLON Challenges 2024 que tuvieron lugar el 2 de febrero, mostrando tantos tipos diversos de tecnología de asistencia asumiendo tareas de disciplina y mostrando la tenacidad y determinación de los pilotos. Los Desafíos vieron nuevos equipos, nuevas tareas y nuevos formatos para muchas de las disciplinas de CYBATHLON.[ Cybathlon ]Ha sido un largo camino hacia los robots propulsados eléctricamente.[ ABB ]Pequeños drones para incendios forestales catastróficos (que cubren más de [40,470 hectares]) son como llevar una linterna para iluminar un campo de fútbol. Este breve vídeo describe los principales usos de los drones de todos los tamaños y por qué y cuándo se utilizan, o por qué no.[ CRASAR ]Probablemente no le sorprenda que haya muchos robots involucrados en la construcción de camiones y furgonetas Rivian.[ Kawasaki Robotics ]El programa Learning Introspective Control (LINC) de DARPA está desarrollando métodos de aprendizaje automático que son prometedores para acercar ese escenario a la realidad. LINC tiene como objetivo mejorar fundamentalmente la seguridad de los sistemas mecánicos, específicamente en vehículos terrestres, barcos, enjambres de drones y robótica, utilizando varios métodos que requieren una potencia informática mínima. El resultado es un controlador impulsado por IA del tamaño de un teléfono móvil.[ DARPA ]
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLORADO, EE. UU. Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfruta de los vídeos de hoy! Figure ha recaudado una Serie B de 675 millones de dólares, valorando la empresa en 2.600 millones de dólares.
[
Figure ]
[
Agility Robotics ]
[
Sanctuary AI ]
Ha llegado el momento de que los robots humanoides entren en las líneas de producción industrial y aprendan a ayudar a los humanos realizando tareas repetitivas, tediosas y potencialmente peligrosas para ellos. Recientemente, el robot humanoide Walker S de UBTECH fue introducido en la línea de montaje del centro avanzado de fabricación de vehículos de NIO, como «pasante» que ayuda en la producción de automóviles. Walker S es el primer robot humanoide bípedo que completa las tareas de una estación de trabajo específica en una línea de producción de vehículos eléctricos móviles.
[
UBTECH ]
Henry Evans sigue trabajando duro para mejorar los robots, esta vez con la ayuda de investigadores de la Universidad Carnegie Mellon. Henry dijo que prefería utilizar la teleoperación de asistencia (HAT) en la cabeza con un robot para determinadas tareas en lugar de depender de un cuidador. “Definitivamente rascarse pica”, dijo. “Me encantaría tenerlo a mi lado todo el día, listo para hacer eso o ponerme una toalla en la boca. Además, alimentarme con alimentos blandos, operar las persianas y hacer trabajos ocasionales en la habitación”. Una innovación en particular, el software llamado Driver Assistance, que ayuda a alinear la pinza del robot con un objeto que el usuario desea recoger, fue “increíble”. dijo Enrique. La asistencia al conductor deja al usuario el control mientras realiza ajustes y correcciones finas que pueden hacer que controlar un robot sea tedioso y exigente. «Eso es mejor que cualquier cosa que haya intentado comprender», dijo Henry, y agregó que le gustaría que se utilizara la Asistencia al Conductor para cada interfaz que controle los robots Stretch.
[
HAT2 ] a través de [ CMU ]
Mire este video para los tres gloriosos segundos al final.
[
Tech United ]
¡Prepárate para rasgar, cortar, cortar y rasgar, ya que DOOM ha vuelto! Este abril, haremos que el legendario juego se pueda jugar en nuestros cortacéspedes robóticos como tributo a 30 años acabando con demonios. Oh, es HOOSKvarna, no HUSKvarna.
[
Husqvarna ] a través de [ Engadget ]
Últimos desarrollos demostrados en la plataforma Ameca Desktop. Diviértete con las capacidades de clonación de visión y voz.
[
Engineered Arts ]
[
NYU ]
Los líderes mundiales en manufactura, recursos naturales, energía y servicios públicos están utilizando nuestros robots autónomos para recopilar datos de mayor calidad y mayores cantidades que nunca. Se han desplegado miles de Spots en todo el mundo (más que cualquier otro robot andante) para afrontar este desafío. Esta versión ayuda a los equipos de mantenimiento a aprovechar el poder de la IA con nuevas capacidades de software y mejoras de Spot.
[
Boston Dynamics ]
Los sistemas robóticos modulares autorreconfigurables son más adaptables que los sistemas convencionales. Este artículo propone un novedoso robot autoconfigurable modular de forma libre y estructura de celosía llamado FreeSN, que contiene módulos de nodos y puntales. Este artículo presenta un novedoso sistema de identificación de configuración para FreeSN, que incluye localización magnética de puntos de conexión, identificación de módulos, fusión de orientación de módulos y fusión de configuración del sistema.
[
Freeform Robotics ]
El OOS-SIM (On-Orbit Servicing Simulator) es un simulador para tareas de servicio en órbita, como reparación, mantenimiento y montaje, que deben realizarse en satélites que orbitan alrededor de la Tierra. Simula las condiciones operativas en órbita, como la sensación de ingravidez y la fuerte iluminación.
[
DLR ]
La próxima competición CYBATHLON, que se celebrará nuevamente en 2024, derriba barreras entre el público, las personas con discapacidad, los investigadores y los desarrolladores de tecnología. Del 25 al 27 de octubre de 2024, el CYBATHLON se llevará a cabo en formato global en el Arena Schluefweg en Kloten, cerca de Zurich, y en centros locales de todo el mundo.
[
CYBATHLON ]
La historia de George es un testimonio del increíble viaje que se desarrolla cuando la pasión, la oportunidad y la comunidad convergen. Su viaje de entusiasta de los drones a alguien que contribuye activamente a marcar la diferencia no sólo en su comunidad local sino también a nivel mundial; Sirve como un rayo de esperanza para todos los que se atreven a soñar y perseguir sus pasiones.
[
WeRobotics ]
En caso de que lo hayas olvidado, Amazon tiene muchos robots.
[
Amazon Robotics ]
La historia de cincuenta años de innovación robótica de ABB que comenzó en 1974 con la venta del primer robot comercial totalmente eléctrico del mundo, el IRB 6. Björn Weichbrodt fue una figura clave en el desarrollo del IRB 6.
[
ABB ]
Debate sobre robótica del Simposio de robótica e inteligencia artificial de Ingenuity Labs (RAIS2023) del 12 de octubre de 2023: ¿La robótica está ayudando o obstaculizando nuestro progreso hacia los Objetivos de Desarrollo Sostenible de la ONU?
[
Ingenuity Labs ]
Artículos de su sitioArtículos relacionados en la Web
Source link