
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfrute de los videos de hoy! Presentamos Human to Humanoid (H2O), un marco basado en aprendizaje por refuerzo (RL) que permite la teleoperación de todo el cuerpo en tiempo real de un robot humanoide de tamaño completo con solo una cámara RGB. Logramos con éxito la teleoperación de movimientos dinámicos de todo el cuerpo en escenarios del mundo real, incluidos caminar, saltar hacia atrás, patear, girar, saludar, empujar, boxear, etc. Hasta donde sabemos, esta es la primera demostración para lograr el aprendizaje. -Teleoperación humanoide de cuerpo entero en tiempo real.[ CMU ]Los robots con patas tienen el potencial de atravesar terrenos complejos y acceder a espacios reducidos más allá del alcance de las plataformas tradicionales gracias a su capacidad para seleccionar cuidadosamente puntos de apoyo y adaptar de manera flexible su postura corporal mientras caminan. Sin embargo, la implementación sólida en aplicaciones del mundo real sigue siendo un desafío abierto. En este artículo, presentamos un método para el control de la locomoción de las piernas utilizando aprendizaje por refuerzo y representaciones volumétricas 3D para permitir una locomoción robusta y versátil en entornos confinados y no estructurados.[ Takahiro Miki ]Claro, 3,3 metros por segundo es rápido para un humanoide, pero estoy más impresionado por los giros mientras camino escaleras abajo.[ Unitree ]Mejorar la seguridad de los manipuladores colaborativos requiere la reducción de la inercia en la parte móvil. Introducimos un enfoque novedoso en forma de un alineador de alambre 3D pasivo, que sirve como un mecanismo de transmisión de potencia liviano y de baja fricción, logrando así la baja inercia deseada en la operación del manipulador.[ SAQIEL ]Gracias, Temma!Robot Era acaba de lanzar Humanoid-Gym, un marco de aprendizaje por refuerzo de código abierto para humanoides bípedos. Como se puede ver en el vídeo, los algoritmos RL le han dado al robot, llamado Xiao Xing, o XBot, la capacidad de subir y bajar cajas apiladas al azar con relativa estabilidad y facilidad.[ Robot Era ]»Captura bimanual consciente del impacto de objetos de gran impulso». ¿Necesito decir mas?[ SLMC ]Más del 80% de los supervivientes de un accidente cerebrovascular experimentan dificultades para caminar, lo que afecta significativamente su vida diaria, su independencia y su calidad de vida en general. Ahora, una nueva investigación de la Universidad de Massachusetts Amherst amplía los límites de la recuperación de un accidente cerebrovascular con un exoesqueleto robótico de cadera único, diseñado como una herramienta de entrenamiento para mejorar la función de caminar. Esto invita a la posibilidad de nuevas terapias que sean más accesibles y más fáciles de trasladar de la práctica a la vida diaria, en comparación con los métodos de rehabilitación actuales.[ UMass Amherst ]¡Gracias, Julia! La manipulación aquí es bastante impresionante, pero es difícil saber qué tan impresionante sin saber también cuánto se aceleró el video.[ Somatic ]Los drones DJI trabajan para hacer del mundo un lugar mejor y una de las formas en que lo hacemos es a través del trabajo de conservación. Nos asociamos con Halo Robotics y OFI Orangutan Foundation International para mostrar cómo estos drones pueden generar un impacto.[ DJI ]El objetivo de la prueba es demostrar la extracción y sustitución de módulos satelitales en un formato CubeSat 27U utilizando el control de realidad aumentada de un robot. En este caso de uso, el satélite «cliente» se actualiza y reabastece de combustible utilizando componentes modulares. Luego, el robot retirará el módulo de computadora defectuoso y lo colocará en un dispositivo. Luego hará lo mismo con el tanque de propulsor. Luego, el robot los colocará correctamente nuevamente en el satélite.[ Extend Robotics ]Este video presenta algunos de los momentos más destacados y favoritos de los CYBATHLON Challenges 2024 que tuvieron lugar el 2 de febrero, mostrando tantos tipos diversos de tecnología de asistencia asumiendo tareas de disciplina y mostrando la tenacidad y determinación de los pilotos. Los Desafíos vieron nuevos equipos, nuevas tareas y nuevos formatos para muchas de las disciplinas de CYBATHLON.[ Cybathlon ]Ha sido un largo camino hacia los robots propulsados eléctricamente.[ ABB ]Pequeños drones para incendios forestales catastróficos (que cubren más de [40,470 hectares]) son como llevar una linterna para iluminar un campo de fútbol. Este breve vídeo describe los principales usos de los drones de todos los tamaños y por qué y cuándo se utilizan, o por qué no.[ CRASAR ]Probablemente no le sorprenda que haya muchos robots involucrados en la construcción de camiones y furgonetas Rivian.[ Kawasaki Robotics ]El programa Learning Introspective Control (LINC) de DARPA está desarrollando métodos de aprendizaje automático que son prometedores para acercar ese escenario a la realidad. LINC tiene como objetivo mejorar fundamentalmente la seguridad de los sistemas mecánicos, específicamente en vehículos terrestres, barcos, enjambres de drones y robótica, utilizando varios métodos que requieren una potencia informática mínima. El resultado es un controlador impulsado por IA del tamaño de un teléfono móvil.[ DARPA ]
Source link
Etiqueta: robótica Página 3 de 5

Ya has visto esto antes: un robot de descarga de camiones que se compone de una base móvil con un brazo que se mete en la parte trasera de un remolque y luego usa succión para agarrar cajas apiladas y colocarlas en una cinta transportadora. Hemos escrito sobre un par de empresas que hacen esto y hay aún más por ahí. Es fácil entender por qué: la descarga de remolques implica un entorno bastante estructurado y controlado con una tarea muy repetitiva, es un trabajo duro que apesta para los humanos y hay una enorme cantidad de demanda. Si bien es probable que haya suficiente espacio para un montón de diferentes compañías de robótica en el espacio de descarga de remolques, un cliente determinado probablemente solo elegirá una, y elegirá la que ofrezca la combinación adecuada de seguridad. capacidad y costo. Anyware Robotics cree que tiene esa combinación, con la ayuda de una solución de manejo de cajas que es a la vez muy inteligente y tan obvia que me pregunto por qué no se me ocurrió a mí mismo. El diseño general de Pixmo es bastante estándar en lo que respecta a los robots de descarga de remolques, pero algunos de los detalles son interesantes. Se nos dice que Pixmo es el único sistema de descarga de remolques que integra un brazo colaborativo de carga pesada, en realidad un brazo comercial bastante nuevo de Fanuc. Esto significa que Anyware Robotics no tiene que preocuparse por su propio hardware, y también que su robot es posiblemente más seguro, ya que cuenta con la certificación ISO de seguridad para trabajar directamente con personas. La base es personalizada, pero Anyware la está subcontratando a un gran OEM de robótica. «Hemos hecho un gran esfuerzo para asegurarnos de que la mayoría de los componentes de nuestro robot estén disponibles en el mercado», nos dice el cofundador y director ejecutivo Thomas Tang. «Ya hay tantos proveedores maduros y rentables que queremos dejar la cadena de suministro, la certificación y las pruebas de confiabilidad en manos de otra persona». Y si bien existe una selección de robots móviles automatizados (AMR) que parecen capaces de hacer el trabajo, el problema es que todos están diseñados para superficies planas y entran y salen de la parte trasera del remolque con frecuencia. Implica una rampa corta y empinada, de ahí la necesidad de un diseño propio. Incluso con la base personalizada, Tang dice que Pixmo es muy rentable y la compañía predice que costará aproximadamente un tercio del costo de otras soluciones con una amortización de aproximadamente 24 meses. Pero aquí está la parte realmente inteligente: Anyware Robotics Descarga del remolque de Pixmo Ese sistema transportador frente a las cajas es un complemento que se utiliza como soporte de Pixmo. Aquí hay dos beneficios: primero, tener el complemento transportador alineado con la base de una caja minimiza la cantidad de elevación que tiene que realizar Pixmo. Esto permite a Pixmo manejar cajas de hasta 65 libras con una técnica de elevación y deslizamiento, colocándola en el extremo superior de la carga útil del robot de descarga del remolque. Y el segundo beneficio es que el sistema complementario reduce la distancia que Pixmo tiene para mover la caja lo más pequeña posible, eliminando la necesidad de que el brazo gire para colocar una caja en un transportador al lado. o detrás de sí mismo. Reducir este tiempo de ciclo significa que Pixmo puede alcanzar un rendimiento de hasta 1000 cajas por hora, aproximadamente una caja cada cuatro segundos, lo que según Internet es bastante rápido, incluso para un ser humano profesional. Anyware Robotics presentará este sistema complementario en MODEX la próxima semana y tienen una patente pendiente sobre la idea. Esta parece una idea tan simple y útil que le pregunté a Tang por qué fueron los primeros en proponerla. «En las empresas emergentes de robótica, tiende a haber un problema de mentalidad heredada», me dijo Tang. “Cuando la gente lleva tantos años trabajando en brazos robóticos, simplemente pensamos en cómo utilizarlos para resolverlo todo. Quizás esa sea la razón por la que a otras empresas no se les ocurrió esta solución”. Tang dice que Anyware comenzó con diseños de complementos mucho más complicados antes de encontrar esta solución. «Por lo general, la solución más simple es la que requiere más prueba y error». Anyware Robotics se centra en la descarga de remolques por ahora, pero Pixmo podría adaptarse fácilmente para paletizar y despaletizar o, algo menos fácilmente, para otras tareas del almacén, como la preparación de pedidos o el cuidado de máquinas. Pero ¿por qué detenerse ahí? Un manipulador móvil puede (teóricamente) hacerlo todo (casi), y eso es exactamente lo que quiere Tang: en nuestra visión a largo plazo, creemos que el futuro tendrá dos tipos diferentes de robots de uso general. En una dirección está la forma humanoide, que es una solución realmente flexible para trabajos en los que se desea reemplazar a un humano. Pero hay muchísimos trabajos que simplemente no son razonables para que los realice un cuerpo humano. Por lo tanto, creemos que debería haber otra forma de robot de uso general, diseñado para tareas industriales. Nuestra filosofía de diseño va en esa dirección: también es de uso general, pero para aplicaciones industriales. Con poco más de un año, Anyware ya logró completar un programa piloto (y convertirlo en una orden de compra). Actualmente se encuentran en medio de varios otros programas piloto con proveedores de logística externos líderes y esperan pasar los próximos meses enfocándose en la productización con el objetivo de lanzar la primera versión comercial de Pixmo en julio de este año. Artículos de su sitioArtículos relacionados en la Web
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.HRI 2024: 11–15 de marzo de 2024, BOULDER, COLORADO, EE. UU. Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13–17 de mayo de 2024, YOKOHAMA, JAPÓNRoboCup 2024: 17–22 de julio de 2024, EINDHOVEN, PAÍSES BAJOS ¡Disfruta de los vídeos de hoy! Figure ha recaudado una Serie B de 675 millones de dólares, valorando la empresa en 2.600 millones de dólares.
[
Figure ]
[
Agility Robotics ]
[
Sanctuary AI ]
Ha llegado el momento de que los robots humanoides entren en las líneas de producción industrial y aprendan a ayudar a los humanos realizando tareas repetitivas, tediosas y potencialmente peligrosas para ellos. Recientemente, el robot humanoide Walker S de UBTECH fue introducido en la línea de montaje del centro avanzado de fabricación de vehículos de NIO, como «pasante» que ayuda en la producción de automóviles. Walker S es el primer robot humanoide bípedo que completa las tareas de una estación de trabajo específica en una línea de producción de vehículos eléctricos móviles.
[
UBTECH ]
Henry Evans sigue trabajando duro para mejorar los robots, esta vez con la ayuda de investigadores de la Universidad Carnegie Mellon. Henry dijo que prefería utilizar la teleoperación de asistencia (HAT) en la cabeza con un robot para determinadas tareas en lugar de depender de un cuidador. “Definitivamente rascarse pica”, dijo. “Me encantaría tenerlo a mi lado todo el día, listo para hacer eso o ponerme una toalla en la boca. Además, alimentarme con alimentos blandos, operar las persianas y hacer trabajos ocasionales en la habitación”. Una innovación en particular, el software llamado Driver Assistance, que ayuda a alinear la pinza del robot con un objeto que el usuario desea recoger, fue “increíble”. dijo Enrique. La asistencia al conductor deja al usuario el control mientras realiza ajustes y correcciones finas que pueden hacer que controlar un robot sea tedioso y exigente. «Eso es mejor que cualquier cosa que haya intentado comprender», dijo Henry, y agregó que le gustaría que se utilizara la Asistencia al Conductor para cada interfaz que controle los robots Stretch.
[
HAT2 ] a través de [ CMU ]
Mire este video para los tres gloriosos segundos al final.
[
Tech United ]
¡Prepárate para rasgar, cortar, cortar y rasgar, ya que DOOM ha vuelto! Este abril, haremos que el legendario juego se pueda jugar en nuestros cortacéspedes robóticos como tributo a 30 años acabando con demonios. Oh, es HOOSKvarna, no HUSKvarna.
[
Husqvarna ] a través de [ Engadget ]
Últimos desarrollos demostrados en la plataforma Ameca Desktop. Diviértete con las capacidades de clonación de visión y voz.
[
Engineered Arts ]
[
NYU ]
Los líderes mundiales en manufactura, recursos naturales, energía y servicios públicos están utilizando nuestros robots autónomos para recopilar datos de mayor calidad y mayores cantidades que nunca. Se han desplegado miles de Spots en todo el mundo (más que cualquier otro robot andante) para afrontar este desafío. Esta versión ayuda a los equipos de mantenimiento a aprovechar el poder de la IA con nuevas capacidades de software y mejoras de Spot.
[
Boston Dynamics ]
Los sistemas robóticos modulares autorreconfigurables son más adaptables que los sistemas convencionales. Este artículo propone un novedoso robot autoconfigurable modular de forma libre y estructura de celosía llamado FreeSN, que contiene módulos de nodos y puntales. Este artículo presenta un novedoso sistema de identificación de configuración para FreeSN, que incluye localización magnética de puntos de conexión, identificación de módulos, fusión de orientación de módulos y fusión de configuración del sistema.
[
Freeform Robotics ]
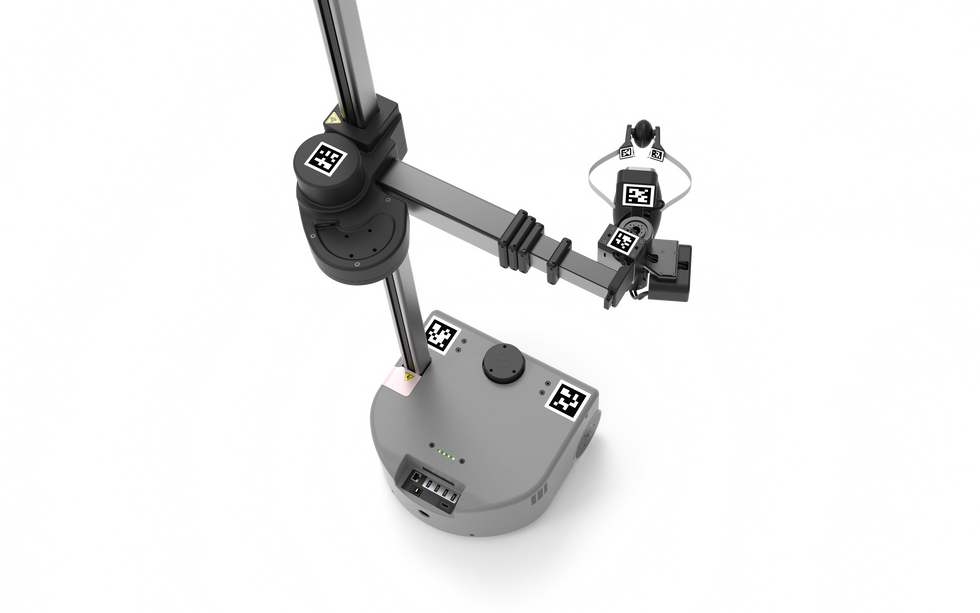
El OOS-SIM (On-Orbit Servicing Simulator) es un simulador para tareas de servicio en órbita, como reparación, mantenimiento y montaje, que deben realizarse en satélites que orbitan alrededor de la Tierra. Simula las condiciones operativas en órbita, como la sensación de ingravidez y la fuerte iluminación.
[
DLR ]
La próxima competición CYBATHLON, que se celebrará nuevamente en 2024, derriba barreras entre el público, las personas con discapacidad, los investigadores y los desarrolladores de tecnología. Del 25 al 27 de octubre de 2024, el CYBATHLON se llevará a cabo en formato global en el Arena Schluefweg en Kloten, cerca de Zurich, y en centros locales de todo el mundo.
[
CYBATHLON ]
La historia de George es un testimonio del increíble viaje que se desarrolla cuando la pasión, la oportunidad y la comunidad convergen. Su viaje de entusiasta de los drones a alguien que contribuye activamente a marcar la diferencia no sólo en su comunidad local sino también a nivel mundial; Sirve como un rayo de esperanza para todos los que se atreven a soñar y perseguir sus pasiones.
[
WeRobotics ]
En caso de que lo hayas olvidado, Amazon tiene muchos robots.
[
Amazon Robotics ]
La historia de cincuenta años de innovación robótica de ABB que comenzó en 1974 con la venta del primer robot comercial totalmente eléctrico del mundo, el IRB 6. Björn Weichbrodt fue una figura clave en el desarrollo del IRB 6.
[
ABB ]
Debate sobre robótica del Simposio de robótica e inteligencia artificial de Ingenuity Labs (RAIS2023) del 12 de octubre de 2023: ¿La robótica está ayudando o obstaculizando nuestro progreso hacia los Objetivos de Desarrollo Sostenible de la ONU?
[
Ingenuity Labs ]
Artículos de su sitioArtículos relacionados en la Web
Source link
Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Cybathlon Challenges: 02 de febrero de 2024, ZURICHHRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13– 17 de mayo de 2024, YOKOHAMA, JAPÓN ¡Disfruta de los vídeos de hoy! Al igual que un humano real, Acrobot a veces te dará patadas en la cara.
[ Acrobotics ]
¡Gracias Isabel! Me tenías en «robots sin extremidades con forma de gusanos».
[ GitHub ] a través de [ Georgia Tech ]
Filmado en julio de 2017, este video nos muestra usando Atlas para apagar un «incendio» en nuestro muelle de carga. Esto utiliza una combinación de teleoperación y comportamientos autónomos a través de una única computadora remota. Robot construido por Boston Dynamics para el DARPA Robotics Challenge en 2013. Software de IHMC Robotics. Yo diría que en medio de una tormenta es probablemente el mejor momento para iniciar un incendio que se espera que sea extinguido por un robot.
[ IHMC ]
Estamos trabajando duro, pero Atlas todavía tiene tiempo para un descanso para bailar.
[ Boston Dynamics ]
Esto es genial: BruBotics está probando su tecnología de pinzas robóticas autorreparables en pinzas comerciales de Festo.
[ Paper ] a través de [ BruBotics ]
¡Gracias Bram!
[ Hello Robot ]
Inspirados por expertos en cuidados, propusimos un esquema de asistencia robótica interactiva bimanual para vestirse, que no tiene precedentes en investigaciones anteriores. En el esquema, un robot interactivo se da la mano con el humano, apoyándolo/guiándolo así en el proceso de vestirse, mientras el robot realiza la tarea de vestirse. Este trabajo representa un cambio de paradigma en la forma de pensar sobre la tarea de asistencia para vestirse, de un robot a un brazo a dos robots a un brazo.
[ Project ]
¡Gracias Jihong! Tony Punnoose Valayil, del Instituto de Robótica de la Academia de Ciencias de Bulgaria, escribió para compartir algunos robots de rehabilitación manual de muy bajo coste para uso doméstico. En este vídeo, presentamos una rehabilitación asistida por robot de la articulación de la muñeca que puede ayudar a restaurar la fuerza perdida en la extremidad superior debido a un accidente cerebrovascular. Este robot es muy rentable y puede utilizarse para la rehabilitación del hogar. En este vídeo, presentamos un robot exoesqueleto que se puede utilizar en casa para rehabilitar los dedos índice y medio de pacientes afectados por un accidente cerebrovascular. Este robot está construido con un coste de 50 euros para que los pacientes que no son económicamente independientes puedan recibir un mejor tratamiento.
[ BAS ]
Aquí hay un trabajo muy impresionante de la Universidad Noruega de Ciencia y Tecnología (NTNU), que muestra un dron rastreando su posición usando radar y odometría basada en lidar en algunos entornos de pesadilla (para robots), incluido un largo túnel que parece igual en todas partes y un Pasillo lleno de humo.
[ Paper ] a través de [ GitHub ]
Lo siento, pero la gente ya debería saber que no se deben hacer vídeos como este para el crowdfunding de robots sociales. Está en Kickstarter por alrededor de $300, y el hecho de que haya sido financiado tan rápidamente me dice que la gente ya se ha olvidado del apocalipsis social de los robots.
[ Kickstarter ]
Presentamos Orbit, su portal para gestionar instalaciones con uso intensivo de activos a través de inteligencia predictiva y en tiempo real. Orbit ofrece un conjunto completamente nuevo de capacidades de gestión de flotas y unificará su ecosistema de robots Boston Dynamics, comenzando con Spot.
[ Boston Dynamics ]
Han pasado muchas cosas en robótica durante el último año. Todo el mundo se pregunta cómo la IA transformará la robótica, y todos los demás se preguntan si los humanoides van a arruinarla o no, y el resto de nosotros estamos ocupados tratando de no ser atropellados por completo mientras las cosas se sacuden como sea que se muevan. . Mientras tanto, en Hello Robot, se han centrado en hacer que su robot Stretch haga cosas útiles y al mismo tiempo sea asequible, confiable, asequible, ampliable, asequible, amigable para la comunidad y asequible. Estos son algunos problemas realmente difíciles e importantes que a veces pueden verse abrumados por cosas más llamativas. Hoy, Hello Robot anuncia Stretch 3, que proporciona un conjunto de actualizaciones a lo que (con bastante precisión) llaman «el único desarrollador ligero y capaz del mundo». manipulador móvil amigable”. E impresionantemente, han logrado hacerlo sin olvidar toda esa parte «asequible». Hola, RobotStretch 3 tiene el mismo aspecto que las versiones anteriores, pero hay actualizaciones importantes que vale la pena destacar. Lo más impactante es que Stretch 3 ahora viene con el diestro kit de muñeca que solía ser un complemento, y ahora también incluye una cámara Intel Realsense D405 montada justo detrás de la pinza, lo cual es de gran ayuda tanto para la autonomía como para la teleoperación remota. —una nueva característica útil que se incluye con Stretch 3 y que se basa en una investigación del laboratorio de Maya Cakmak en la Universidad de Washington en Seattle. Este es un ejemplo de cómo convertir la innovación de la comunidad de usuarios de Stretch en características del producto, un enfoque de desarrollo de productos que parece estar funcionando bien para Hello Robot. «Realmente hemos estado aprendiendo de nuestra comunidad», dice el cofundador y El director ejecutivo, Aaron Edsinger. “El año pasado, vimos un aumento real en las publicaciones y parece que estamos llegando a este momento crítico con Stretch. Entonces, con Stretch 3, se trata de implementar características que nuestra comunidad nos ha estado pidiendo”. “Cuando lo lanzamos, no teníamos una muñeca diestra al final como estándar, porque estábamos tratando de comenzar con el producto mínimo viable. ”, dice el cofundador y director de tecnología de Hello Robot, Charlie Kemp. «Y lo que descubrimos es que a casi todos los pedidos se les agregaba la muñeca diestra, y al tenerla como estándar, pudimos dedicarle más atención y convertirla en un sistema mucho más robusto y capaz». dice Kemp que hacer que Stretch haga todo desde el primer momento (con soporte de Hello Robot) marca una gran diferencia para sus clientes de investigación. «Hacer que sea más fácil para las personas probar cosas; hemos aprendido a valorarlo realmente, porque cuantos más pasos tengan que pasar las personas para experimentarlo, es menos probable que lo desarrollen». En el contexto de la investigación, esto es importante porque de lo que realmente estamos hablando es del tiempo: cuanto más tiempo dediquen las personas a intentar hacer que el robot funcione, menos tiempo dedicarán a conseguir que el robot haga cosas útiles. Hola robot. En este punto, es posible que esté pensando en Stretch como una plataforma de investigación. O quizás esté pensando en Stretch como un robot para personas con discapacidades, si lee nuestro artículo de portada de noviembre de 2023 sobre Stretch, Henry y Jane Evans. Y el robot es definitivamente ambas cosas. Pero Hello Robot enfatiza que estos mercados específicos no son su objetivo final; ven a Stretch como un manipulador móvil generalista con futuro en el hogar, como sugiere este video promocional de Stretch 3: Hello Robot Vajilla, lavandería, cañones de burbujas: todos estos son fundamental para el funcionamiento de cualquier hogar normal. «Stretch es un robot inclusivo», dice Kemp. “No es sólo para adultos mayores o personas con discapacidad. Queremos un robot que pueda ser beneficioso para todos. Nuestra visión, y lo que creemos que realmente sucederá, ya sea que seamos nosotros o alguien más, es que habrá un robot doméstico versátil y de uso general. En este momento, claramente, nuestro mercado aún no son los consumidores en el hogar. Pero ahí es donde queremos llegar”. Durante décadas se han prometido robots en el hogar y, con la notable excepción del Roomba, no ha habido mucho éxito. La idea de un robot que pueda manipular platos o lavar la ropa es tentadora, pero ¿es realista a corto o mediano plazo? Edsinger, que ha estado en todo este asunto de los robots durante mucho tiempo, es optimista al respecto y sobre el papel que desempeñará Stretch. «Hay muchísimos lugares donde se puede ver el progreso que se está produciendo, en la detección y la manipulación», dice Edsinger. “Puedo imaginar que esas cosas se unirán ahora de una manera que no podría haberlo hecho hace 5 o 10 años, cuando parecía increíblemente difícil”. “Somos muy pragmáticos acerca de lo que es posible. Y creo que creemos que las cosas están cambiando más rápido de lo que anticipamos; hace 10 años, tenía en mente un camino lineal bastante claro para la robótica, pero es difícil imaginar realmente dónde estaremos en términos de capacidades de los robots dentro de 10 años. desde ahora.» —Aaron Edsinger, Hello RobotDiría que todavía es increíblemente difícil, pero Edsinger tiene razón en que muchas de las piezas parecen estar encajando. Podría decirse que el hardware es el mayor desafío aquí, porque trabajar en casa impone grandes limitaciones sobre el tipo de hardware que se puede utilizar. No es probable que veas un humanoide en una casa en el corto plazo, porque sería realmente peligroso, e incluso un cuadrúpedo probablemente causará más problemas de los que vale en un ambiente hogareño. Hello Robot es consciente de esto y ese ha sido uno de los principales impulsores del diseño de Stretch. «Creo que realmente vale la pena destacar la portabilidad de Stretch porque hay mucho valor en algo que tal vez no sea obvio», nos dice Edsinger. . Poder simplemente coger y mover un manipulador móvil no es normal. Es casi trivial trabajar con el peso de Stretch (24,5 kilogramos), en marcado contraste con prácticamente cualquier otro robot móvil con brazo: Stretch cabe en lugares en los que caben los humanos y logra tener un espacio de trabajo similar también, y su parte inferior es pesada. El diseño hace que sea seguro para los humanos estar cerca. No puede subir escaleras, pero se puede subir escaleras arriba, lo cual es más importante de lo que parece. También cabe en la parte trasera de un coche. Stretch está diseñado para explorar el mundo, no sólo una copia del mundo en un laboratorio de investigación. “Los estudiantes de la Universidad de Nueva York han estado llevando Stretch a decenas de hogares en Nueva York”, dice Edsinger. “Subieron uno por un camino de cuatro pisos. Esto permite la recopilación de datos reales en el hogar. Y aquí es donde empezarán a aparecer los robots domésticos: cuando se puedan tener cientos de ellos en los hogares recopilando datos para el aprendizaje automático”. “Ahí es donde está la oportunidad”, añade Kemp. “Es ese compromiso con el mundo sobre dónde aplicar la tecnología de manera beneficiosa. Y si estás en un laboratorio, no lo encontrarás”. Hemos visto algunos ejemplos convincentes de esto recientemente, con Mobile ALOHA. Se trata de robots que aprenden a ser autónomos haciendo que humanos los teleoperen mediante habilidades domésticas comunes. Pero el sistema no es particularmente portátil y cuesta casi 32.000 dólares sólo en piezas. No me malinterpreten: me encanta la investigación, simplemente será difícil escalarla y, para recopilar suficientes datos para abordar el mundo de manera efectiva, la escala es fundamental. Stretch es mucho más fácil de escalar, porque puedes comprar uno o dos. Es posible que hayas notado que algunos de los videos de Stretch 3 tienen dos robots que colaboran entre sí. Esto aún no es autónomo, pero con dos robots, un solo humano (o un par de humanos) puede teleoperarlos como si fueran efectivamente un solo robot de dos brazos: Hola Robot. Básicamente, lo que tienes aquí es un robot de dos brazos. robot que (muy intencionadamente) no tiene nada que ver con humanoides. Como explica Kemp: “Estamos tratando de ayudar a nuestra comunidad y al mundo a ver que existe un camino diferente al modelo humano. Los humanos tendemos a pensar en la solución preexistente: las personas tienen dos brazos, así que pensamos, bueno, voy a necesitar dos brazos en mi robot o tendrá todos estos problemas”. Kemp señala que robots como Stretch han demostrado que en realidad se pueden hacer muchas cosas con un solo brazo, pero dos brazos aún pueden ser útiles para un subconjunto sustancial de tareas comunes. “El desafío para nosotros, para el cual nunca había podido encontrar una solución, era cómo incorporar dos brazos en un manipulador móvil liviano, portátil, compacto y asequible. ¡No puedes!”Pero con dos Estiramientos, no sólo tienes dos brazos, sino también dos hombros que puedes poner donde quieras. ¿Lavar un plato? Probablemente querrás tener dos brazos juntos para una manipulación colaborativa. ¿Hacer una cama? Separe los dos brazos para manipular ambos lados de una sábana a la vez. Es una especie de manipulación bimanual distribuida bajo demanda, que sin duda añade un poco de complejidad pero también resuelve un montón de problemas cuando se trata de manipulación práctica en el hogar. Ah, y si esas herramientas teleop parecen tenazas de cocina modificadas, es porque son tenazas de cocina modificadas. Por supuesto, comprar dos robots Stretch es dos veces más caro que comprar un solo robot Stretch, y aunque el costo de Stretch 3 es de poco menos de $25,000 es muy económico para un manipulador móvil y muy asequible en un contexto de investigación o educación, todavía estamos bastante lejos de algo que la mayoría de las personas podrían permitirse por sí mismas. Hello Robot dice que producir robots a escala es la respuesta, lo cual estoy seguro es cierto, pero puede ser algo difícil de lograr para una pequeña empresa. Avanzar lentamente hacia la escala es al menos en parte intencional, nos dice Kemp. “Todavía estamos en el proceso de descubrir la verdadera forma de Stretch: lo que realmente debería ser el robot. Si intentáramos escalar para fabricar muchísimos robots a un costo mucho menor antes de comprender fundamentalmente cuáles serían las necesidades y los desafíos, creo que sería un error. Y hay muchas lápidas de varias empresas de robótica doméstica, algunas de las cuales realmente me encantaron. No queremos convertirnos en uno de esos”. Esto no quiere decir que Hello Robot no esté intentando activamente hacer que Stretch sea más asequible, y Edsinger sugiere que la próxima versión del robot se centrará más en eso. Pero, y esto es súper importante, Kemp nos dice que Stretch ha sido, es y seguirá siendo sustentable para Hello Robot: “De hecho, cobramos lo que deberíamos cobrar para poder tener un negocio sustentable”. En otras palabras, Hello Robot no depende de un futuro nebuloso definido a escala para realizar la transición a un modelo de negocio que pueda desarrollar, vender y respaldar robots. Pueden hacerlo ahora mismo mientras mantienen las luces encendidas. «Nuestras ventas tienen suficiente margen para que nuestro negocio funcione», dice Kemp. “Eso es parte de nuestra disciplina”. Stretch 3 ya está disponible por $24,950, que es casi lo mismo que el costo de Stretch 2 con los complementos opcionales incluidos. Hay muchísimas otras características nuevas que no pudimos incluir en este artículo, incluida la certificación FCC, un brazo más duradero y compatibilidad con GPU externa. Aquí encontrará una lista útil de todas las actualizaciones. Artículos de su sitio Artículos relacionados en la Web
Source link
Odorigui es un tipo de cocina japonesa en la que la gente consume mariscos vivos mientras aún están en movimiento, haciendo que el movimiento sea parte de la experiencia. Es posible que usted tenga algunos sentimientos al respecto (yo definitivamente los tengo), pero desde una perspectiva de investigación, analizar cuáles son esos sentimientos y qué significan no es realmente práctico. Hacerlo de forma controlada sería moral y técnicamente complicado, razón por la cual investigadores japoneses han comenzado a desarrollar robots que pueden comerse mientras se mueven, moviéndose en la boca mientras los masticas. Bienvenido a HERI: Interacción entre humanos y robots comestibles. Ese pequeño y feliz robot al que un humano hambriento le arrancó la cabeza (que, debemos decir, fue excepcionalmente educado al respecto) está hecho principalmente de gelatina, junto con azúcar y jugo de manzana. por gusto. Después de mezclar todos los ingredientes, se vertió en un molde y se refrigeró durante 12 horas para que se endureciera, y la textura resultante terminó como una gomita masticable. El molde incorporó un par de cámaras de aire en la estructura del robot, que estaban conectadas a un sistema neumático que hacía que el robot se moviera hacia adelante y hacia atrás. Dieciséis estudiantes de la Universidad de Osaka tuvieron la oportunidad de comerse uno de estos pequeños robots ondulantes. El proceso consistía en poner la boca alrededor del robot, dejar que el robot se moviera allí durante 10 segundos para disfrutar de la experiencia completa y luego morderlo, masticarlo y tragarlo. Se eligió a los japoneses en parte porque esta investigación se realizó en Japón, pero también debido, según el artículo, «a las influencias culturales en el uso de términos onomatopéyicos». En japonés, hay términos que son útiles para comunicar tipos específicos de texturas que no se pueden cuantificar fácilmente. A los participantes se les hizo una serie de preguntas sobre su experiencia, incluidas algunas difíciles: ¿Pensaste que lo que acabas de comer tenía animación? ¿Sentiste una emoción en lo que acabas de comer? ¿Pensaste que lo que acabas de comer tenía inteligencia? ¿Te sientes culpable por lo que acabas de comer? Uf. En comparación con un grupo de control de estudiantes que se comieron el robot cuando no se estaba moviendo, los estudiantes que se comieron el robot en movimiento tenían más probabilidades de interpretarlo como si tuviera un “munya-munya” o “ textura mumble”, lo que demuestra que el movimiento puede influir en la experiencia de comer. El análisis de las respuestas a las preguntas mostró que el robot en movimiento también hacía que las personas lo percibieran como emotivo e inteligente, y provocaba más sentimientos de culpa cuando era consumido. El artículo lo resume bastante bien: «En la condición estacionaria, los participantes percibieron al robot como ‘comida’, mientras que en la condición de movimiento, lo percibieron como una ‘criatura'». La buena noticia aquí es que, dado que estos robots se parecen más a seres vivos que los no robots, podrían potencialmente sustituir a los bichos vivos en un contexto de investigación, dicen los investigadores: «La utilización de robots comestibles en este estudio nos permitió examinar los efectos de las variaciones sutiles del movimiento en el comportamiento alimentario humano en condiciones controladas». condiciones, una tarea que sería un desafío lograr con organismos reales”. Aún queda trabajo por hacer para que los robots se parezcan más a seres vivos específicos, pero ese es el plan a seguir: nuestro diseño de robot comestible propuesto no imita específicamente ninguna forma biológica en particular. Para abordar estas limitaciones, nos centraremos en el campo diseñando robots comestibles que imiten formas relevantes para los debates en curso sobre la escasez de alimentos y las delicias culturales. Específicamente, en futuros estudios, emularemos criaturas consumidas en contextos como dietas basadas en insectos, que se consideran una solución a los problemas de escasez de alimentos, y platos tradicionales japoneses como «Odorigui» o «Ikizukuri (sashimi de pescado vivo)». Se espera que estas imitaciones proporcionen conocimientos profundos sobre las respuestas psicológicas y cognitivas provocadas al consumir robots en movimiento, fusionando la tecnología con las necesidades y las tradiciones culinarias. Explorando la experiencia alimentaria de un robot comestible impulsado neumáticamente: percepción, sabor y textura, por Yoshihiro NakataI , Midori Ban, Ren Yamaki, Kazuya Horibe, Hideyuki Takahashi e Hiroshi Ishiguro de la Universidad de Electrocomunicaciones y la Universidad de Osaka, se publica en PLOS One.
Source link

El mes pasado, 1X (anteriormente Halodi Robotics), con sede en Oslo, Noruega, anunció una enorme Serie B de 100 millones de dólares, y claramente han estado trabajando en ello. Un nuevo video publicado la semana pasada muestra una [insert collective noun for humanoid robots here] de manipuladores móviles tipo Android de EVE que realizan una amplia variedad de tareas aprovechando las redes neuronales de un extremo a otro (píxeles a acciones). Y lo mejor de todo es que el vídeo parece ser más o menos honesto: una sola toma, a (apropiadamente) velocidad 1X y total autonomía. ¡Pero todavía teníamos preguntas! Y 1X tiene respuestas. Si, como yo, tenías algunas preguntas muy importantes después de ver este video, incluido si esa planta está realmente muerta y el destino del cubo pesado que lo acompaña, querrás leer estas preguntas y respuestas con Eric Jang, Vicepresidente. Presidente de Inteligencia Artificial en 1X.IEEE Spectrum: ¿Cuántas tomas se necesitaron para obtener esta toma? Eric Jang: Alrededor de 10 tomas que duraron más de un minuto; Esta era la primera vez que hacíamos un video como este, así que se trataba más de aprender a coordinar al equipo de filmación y preparar el rodaje para que se viera impresionante. ¿Entrenaste a tus robots específicamente en cosas flexibles y transparentes? Jang: ¡No! Entrenamos nuestra red neuronal para que recoja todo tipo de objetos, tanto rígidos como deformables y transparentes. Debido a que entrenamos la manipulación de un extremo a otro a partir de píxeles, recoger objetos deformables y transparentes es mucho más fácil que una tubería de agarre clásica, donde tienes que descubrir la geometría exacta de lo que estás tratando de agarrar. ¿Qué impide que tus robots hagan? ¿Estas tareas son más rápidas? Jang: Nuestros robots aprenden de las demostraciones, por lo que van exactamente a la misma velocidad a la que los teleoperadores humanos demuestran la tarea. Si reunimos demostraciones en las que nos movemos más rápido, también lo harían los robots. ¿Cuántos cubos complementarios pesados resultaron dañados al realizar este vídeo? Jang: A 1X, los cubos complementarios pesados no tienen derechos. Ese es un método genial para cargar, pero Parece mucho más complicado que algún tipo de interfaz de acceso directo a la base. ¿Por qué utilizar la manipulación en su lugar? Jang: Tienes razón en que esta no es la forma más sencilla de cargar el robot, pero si vamos a tener éxito en nuestra misión de construir robots generalmente capaces y confiables que puedan manipular todo tipo de objetos, nuestro Las redes neuronales deben poder realizar esta tarea como mínimo. Además, ¡reduce bastante los costos y simplifica el sistema! ¿Qué animal se supone que es ese peluche azul? Jang: Es un tiburón obeso, creo. ¿Cuántos robots diferentes hay en este video? Jang: ¿17? Y más que son estacionarios. ¿Cómo se distinguen los robots? Jang: Tienen pequeños números impresos en la base. ¿Esa planta está muerta? Jang: Sí, la pusimos allí porque ningún video renderizado CGI/3D jamás pasaría por el problema de agregar una planta muerta. ¿Qué tipo de crisis existencial está teniendo el robot en la ventana? Jang: Se suponía que debía estar abriendo y cerrando la ventana repetidamente (bueno para probar la significancia estadística). Si uno de los robots fuera en realidad un humano con un casco y un traje con pinzas y de pie sobre una base móvil, ¿podría saberlo? Jang: Me sentí muy halagado por este comentario en el video de Youtube: Pero si nos fijamos en el área donde la parte superior del brazo se estrecha en la hombro, es demasiado delgado para que un humano quepa dentro y al mismo tiempo tenga hombros tan anchos: ¿Por qué tus robots están tan felices todo el tiempo? ¿Estás planeando hacer cosas más complejas de HRI con sus caras? Jang: Sí, ¡se están preparando cosas más complejas de HRI! ¿Tus robots pueden colaborar entre sí de forma autónoma? Jang: ¡Estén atentos! ¿Es el tetrominó sesgado el tetrominó más difícil para la manipulación robótica? Jang: ¡Buen partido! Sí, el verde es el peor de todos porque hay muchas formas válidas de pellizcarlo con la pinza y levantarlo. En el aprendizaje robótico, si hay varias formas de captar algo, en realidad puede confundir el modelo de aprendizaje automático. Algo así como pedirle a un automóvil que gire a la izquierda y a la derecha al mismo tiempo para evitar un árbol. Los robots de todos los demás están haciendo café. ¿Tus robots pueden hacer café? Jang: ¡Sí! Estábamos planeando incluir algo de preparación de café en este video como huevo de Pascua, pero la máquina de café se rompió justo antes del rodaje de la película y resulta que es imposible conseguir un Keurig K-Slim en Noruega mediante envío al día siguiente. Actualmente, 1X es Contratar investigadores de IA (aprendizaje por imitación, aprendizaje por refuerzo, capacitación a gran escala, etc.) y operadores de Android (!), lo que en realidad suena como un trabajo súper divertido e interesante. Más aquí. Artículos de su sitio Artículos relacionados en la Web
Source link

Esta es una publicación invitada. Las opiniones expresadas aquí son únicamente las del autor y no representan posiciones de IEEE Spectrum o IEEE. Si algo nos ha enseñado la historia de la narración de Disney es que nunca debemos subestimar el poder de un gran compañero. Aunque los compinches no son las estrellas del programa, brindan vida y energía y hacen avanzar la historia de maneras importantes. Es difícil imaginar a Aladdin sin el Genio, o a Peter Pan sin Campanilla. En robótica, sin embargo, proliferan los actos en solitario. Incluso cuando se utilizan varios robots, normalmente actúan en paralelo. Una razón clave para esto es que la mayoría de los robots están diseñados de manera que dificultan la colaboración directa con otros robots. Los robots rígidos y fuertes son más repetibles y más fáciles de controlar, pero esos diseños perdonan muy poco las imperfecciones y desajustes inherentes al contacto con otro robot. Hacer que los robots trabajen juntos, especialmente si tienen habilidades complementarias, puede abrir algunas oportunidades interesantes, especialmente en el espacio de la robótica del entretenimiento. En Walt Disney Imagineering, nuestros equipos de investigación y desarrollo han estado trabajando en esta idea de colaboración entre robots, y pudimos mostrar el resultado de una de esas colaboraciones en Shanghai esta semana, cuando un pequeño personaje peludo interrumpió los momentos iniciales de la La primera tierra de Zootopia. Nuestro nuevo personaje robótico, Duke Weaselton, subió al escenario del Shanghai Disney Resort por primera vez en diciembre pasado, empujando un quiosco morado y tocando música pop a todo volumen. Como se ve en el video a continuación, la audiencia disfrutó verlo subirse al quiosco e intentar negociar con el presidente de Disney Experiences, Josh D’Amaro, para un nuevo trabajo. Y, por supuesto, algunas ventajas nuevas. Después de unos momentos de negociaciones, Duke es escoltado gentilmente fuera del escenario por los miembros del equipo Richard Landon y Louis Lambie. Lo que puede no ser obvio al principio es que el momento que acabas de ver no fue activado por un robot, sino por dos. Duke Weaselton es la estrella del espectáculo, pero su movimiento dinámico no sería posible sin el quiosco, que es su propio robot independiente y accionado. Si bien estos dos robots son muy diferentes, al trabajar juntos como un solo sistema, pueden hacer cosas que ninguno de los dos podría hacer solo. El personaje y el quiosco reúnen dos tipos de movimiento muy diferentes y crean algo más que la suma de sus partes en el proceso. El personaje es un robot bípedo expresivo con un estilo de movimiento animado y exagerado. Tiene un aspecto fantástico, pero no está optimizado para una locomoción robusta y fiable. El quiosco, por su parte, es un sencillo sistema con ruedas que se comporta de forma muy predecible. Si bien eso es excelente para la confiabilidad, significa que por sí solo no es probable que te sorprenda. Pero cuando combinamos estos dos robots, obtenemos lo mejor de ambos mundos. El personaje robot puede aportar una energía y emoción estrafalarias y desenfrenadas mientras rebota hacia arriba, sobre y a lo largo del quiosco, mientras que el quiosco en sí garantiza que ambos robots lleguen de manera confiable a dondequiera que vayan.Harout Jarchafjian, Sophie Bowe, Tony Dohi, Bill West, Marcela de los Ríos, Bob Michel y Morgan Pope.Morgan Pope La colaboración entre los dos robots se hace posible al diseñarlos para que sean robustos y flexibles, y con movimientos que puedan tolerar una gran cantidad de incertidumbre y al mismo tiempo ofrecer un espectáculo convincente. . Este es el resultado directo de las lecciones aprendidas de un robot anterior, uno que cayó sobre el escenario en SXSW a principios de este año. Nuestra idea básica es que un robot pequeño y liviano puede ser sorprendentemente resistente, y que esta resistencia permite nuevos niveles de libertad creativa en el diseño y ejecución de un espectáculo. Este nivel de robustez también facilita la colaboración entre robots. Debido a que el personaje del robot es resistente y debido a que sus motores y articulaciones tienen cierta flexibilidad, los pequeños errores en la ubicación y la postura no crean grandes problemas como lo harían para un robot más convencional. El personaje puede apoyarse en el quiosco motorizado para crear la ilusión de que lo está empujando por el escenario. Luego, el quiosco utiliza un cabrestante para elevar al personaje a una plataforma, donde los electroimanes ayudan a estabilizar sus pies. Básicamente, el quiosco compensa el hecho de que el propio Duke no puede trepar y puede tambalearse un poco sin tener los pies asegurados. El resultado general es un robot bípedo que se mueve libremente y se siente natural y atractivo, pero que no requiere controles especialmente complicados ni un diseño mecánico de alta precisión. Aquí hay una mirada detrás de escena de nuestro desarrollo de estos sistemas: Disney Imagineering Para programar los movimientos de Duke, nuestro equipo utiliza un proceso de animación que se desarrolló originalmente para la demostración de SXSW, donde un diseñador puede posar el robot con la mano para crear nuevos movimientos. Desde entonces, hemos desarrollado una interfaz que también puede tomar movimientos de herramientas de software de animación convencionales. Luego, los movimientos se pueden ajustar para adaptarse a las limitaciones físicas reales de los robots, y esa información se puede enviar de vuelta a la herramienta de animación. A medida que se desarrollan las animaciones, es fundamental mantener una estrecha sincronización entre el quiosco y el personaje. El sistema está diseñado para que el movimiento de ambos robots esté siempre coordinado y, al mismo tiempo, admita la capacidad de animar de forma flexible robots individuales o partes individuales del robot, como la boca y los ojos. Durante los últimos nueve meses, exploramos algunos tipos diferentes de enfoques de locomoción colaborativa. Los GIF a continuación muestran algunos de los primeros intentos de andar en triciclo, andar en patineta y empujar una caja. En cada caso, la idea es que un personaje robótico eventualmente colabore con otro sistema robótico que ayude a que los movimientos de ese personaje cobren vida de una manera estable y repetible. Disney espera que su robot Judy Hopps pronto pueda utilizar la ayuda de un triciclo, una caja o una patineta robótica para permitir nuevas formas de locomoción. Morgan Pope Esta demostración con Duke Weaselton y su quiosco es solo el comienzo, dice el director de I+D Imagineer Tony Dohi, quien lidera el proyecto para nosotros. “En última instancia, lo que mostramos hoy es un paso importante hacia una visión más amplia. Este proyecto está sentando las bases para robots que puedan interactuar entre sí de maneras sorprendentes y emocionalmente satisfactorias. Hoy es un personaje y un quiosco, pero en el futuro queremos tener múltiples personajes que puedan interactuar entre sí y con nuestros invitados”. Walt Disney Imagineering R&D está explorando una estrategia de desarrollo múltiple para nuestros personajes robóticos. Las atractivas demostraciones de personajes como Duke Weasleton se centran en crear rápidamente prototipos de experiencias completas utilizando técnicas de acceso inmediato. Paralelamente, nuestro grupo de investigación está desarrollando nuevas tecnologías y capacidades que se convierten en los pilares para mejorar las experiencias existentes y diseñar y ofrecer espectáculos completamente nuevos. El equipo de robótica dirigido por Moritz Bächer compartió en IROS en octubre uno de estos elementos, encarnado en un personaje robótico andante muy expresivo y estilizado. Las capacidades demostradas allí pueden eventualmente usarse para ayudar a robots como Duke Weaselton a desempeñarse de manera más flexible, más confiable y más espectacular. «Las demostraciones de personajes auténticas son útiles porque ayudan a informar qué herramientas son las más valiosas para desarrollar», explica Bächer. «Al final, nuestro objetivo es crear herramientas que permitan a nuestros equipos producir y presentar estos programas de forma rápida y eficiente». Esto se relaciona con la idea técnica fundamental detrás del momento del show de Duke Weaselton: ¡la colaboración es clave! Artículos de su sitioArtículos relacionados en la Web
Source link

Video Friday es tu selección semanal de increíbles videos de robótica, recopilados por tus amigos de IEEE Spectrum Robotics. También publicamos un calendario semanal de los próximos eventos de robótica para los próximos meses. Envíenos sus eventos para su inclusión.Cybathlon Challenges: 02 de febrero de 2024, ZURICHHRI 2024: 11–15 de marzo de 2024, BOULDER, COLO.Eurobot Open 2024: 8–11 de mayo de 2024, LA ROCHE-SUR-YON, FRANCIAICRA 2024: 13– 17 de mayo de 2024, YOKOHAMA, JAPÓN ¡Disfruta de los videos de hoy! En este video, presentamos Ringbot, un novedoso robot transformador con ruedas y patas que incorpora un mecanismo monociclo con patas. Ringbot tiene como objetivo proporcionar movilidad versátil reemplazando al conductor y los componentes de conducción de un vehículo monociclo convencional con patas montadas en módulos de conducción compactos dentro de la rueda.[ Paper ] a través de [ KIMLAB ]Ganar dinero con robots siempre ha sido una lucha, pero creo que ALOHA 2 lo ha descubierto. En serio, esa es una capacidad de manipulación impresionante. No sé qué es esa cosa extraña del panda, pero colocar una lente de contacto del paquete en su extraño globo ocular fue una destreza salvaje.[ ALOHA 2 ]Lo más destacado de las pruebas de nuestros nuevos brazos construidos por Boardwalk Robotics. Instaladas en octubre de 2023, estas nuevas armas no son solo para el boxeo y brindan mucha mayor velocidad y potencia. ¡Esto coincide con los objetivos de movilidad y manipulación que tenemos para Nadia! La parte menos dramática pero posiblemente más importante de ese video es cuando Nadia usa sus brazos para ayudarse a mantener el equilibrio contra una pared, que es una de esas cosas que los humanos hacen todo el tiempo sin pensar en ello. Y siempre apreciamos que nos muestren cosas que no combinan perfectamente con cosas que sí lo hacen. Al final, Nadia no logró levantar los brazos laterales. Puedo relacionar; Esa también es mi reacción cuando levanto pesas.[ IHMC ]¡Gracias, Robert! El reciente progreso en humanoides comerciales es simplemente agotador.[ Unitree ]Presentamos un sistema de avatar diseñado para facilitar la encarnación de robots humanoides por parte de operadores humanos, validado a través de iCub3, un humanoide desarrollado en el Istituto Italiano di Tecnologia.[ Science Robotics ]¿Alguna vez has visto un robot esquiando? Robot Ascento disfrutando de un día en las pistas de esquí de Davos.[ Ascento ]Es de destacar que Boston Dynamics ahora dice que Atlas «se prepara para el trabajo real». ¿Me pregunto cuánto hay que leer en eso?[ Boston Dynamics ]¡Mereces estar libre de tareas interminables! ¡TÚ! ¡MERECER! ¡FAENA! ¡LIBERTAD! Estoy bastante seguro de que esto es teleoperado, por lo que, lamentablemente, alguien todavía está haciendo las tareas del hogar.[ MagicLab ]Los UAV (vehículos aéreos no tripulados) multimodales rara vez son capaces de realizar más de dos modalidades, es decir, volar y caminar o volar y posarse. Sin embargo, poder volar, posarse y caminar podría mejorar aún más su utilidad al ampliar su ámbito operativo. Por ejemplo, un robot aéreo podría volar una larga distancia, posarse en un lugar alto para inspeccionar los alrededores y luego caminar para evitar obstáculos que potencialmente podrían inhibir el vuelo. Las aves son capaces de realizar estas tres tareas y, por tanto, ofrecen un ejemplo práctico de cómo se podría desarrollar un robot para hacer lo mismo.[ Paper ] a través de [ EPFL LIS ]Nissan anuncia el modelo conceptual de “Iruyo”, un robot que ayuda a cuidar niños mientras se conduce. Ilyo alivia la ansiedad de la madre, el padre y el bebé en el asiento del conductor. Apoyamos la conducción segura para padres e hijos. Nissan y Akachan Honpo están trabajando en un proyecto para mejorar la vida con los coches y los bebés. Iruyo nació de las voces de madres y padres que decían: «No puedo cargar a mi bebé mientras conduzco solo».[ Nissan ]El edificio 937 alberga los robots más geniales del CERN. Aquí es donde ocurre la acción para construir y programar robots que puedan enfrentar los desafíos poco convencionales que presentan las instalaciones únicas del Laboratorio. Recientemente, un nuevo tipo de robot llamado CERNquadbot ingresó al grupo de robots del CERN y completó con éxito su primera prueba de protección radiológica en el Área Norte. [ CERN ]Felicitaciones a Starship, el servicio de entrega robótico de OG, por su recaudación de 90 millones de dólares.[ Starship ]Al combinar imágenes 2D con modelos básicos para crear campos de características 3D, un nuevo método del MIT ayuda a los robots a comprender y manipular objetos cercanos con indicaciones en lenguaje abierto.[ GitHub ] a través de [ MIT ]Esta es una de esas cosas que es mucho más difícil de lo que parece.[ ROAM Lab ]Nuestro sistema de atención actual no escala y nuestras poblaciones están envejeciendo rápidamente. Los robodies son multiplicadores para el personal de atención, permitiéndoles trabajar junto con ayudantes locales para brindar protección y asistencia las 24 horas del día mientras mantienen contacto personal con las personas de la comunidad.[ DEVANTHRO ]Es el robot humanoide más pequeño del mundo, ¡hasta que alguien presenta servos un poco más pequeños![ Guinness ]¡Deep Robotics os desea un feliz año del dragón![ Deep Robotics ]Los investigadores de SEAS están ayudando a desarrollar viviendas extraterrestres y espaciales resilientes y autónomas mediante el desarrollo de tecnologías que permitan a los robots autónomos reparar o reemplazar componentes dañados en un hábitat. La investigación forma parte del instituto Resilient ExtraTerrestrial Habitats (RETHi) y está dirigida por la Universidad Purdue, en asociación con SEAS, la Universidad de Connecticut y la Universidad de Texas en San Antonio. Su objetivo es “diseñar y operar hábitats resilientes en el espacio profundo que puedan adaptarse, absorber y recuperarse rápidamente de perturbaciones esperadas e inesperadas”.[ Harvard ]¡Descubra cómo una visión audaz se convirtió en una historia de éxito! El Instituto de Robótica y Mecatrónica del DLR investiga desde los años 90 brazos robóticos, originalmente destinados a su uso en el espacio. Fue un viaje largo y ambicioso antes de que estos brazos robóticos livianos pudieran usarse en la tierra y finalmente en los quirófanos, un viaje que requirió experiencia concentrada en robótica, cooperación interdisciplinaria y, en última instancia, una transferencia de tecnología exitosa.][ DLR MIRO ]La robótica está cambiando el mundo, impulsada por equipos enfocados de diversos expertos. Willow Garage operó con el mantra “Primero el impacto, luego el retorno del capital” y a través de ROS y PR2 tuvo un impacto enorme. Los robots móviles autónomos finalmente están siendo aceptados en la industria de servicios, y Savioke (ahora Relay Robotics) se creó para impulsar ese impacto. Esta charla rastreará la evolución de los robots Relay y su implementación en hoteles, hospitales y otras industrias de servicios, comenzando con sus raíces en Willow Garage. A medida que la tecnología robótica se prepara para la próxima ronda de avances, ¿cómo creamos y mantenemos las organizaciones que continúan impulsando el progreso?[ Northwestern ]
Source link

Es sorprendente cómo los cuadrotores han escalado durante la última década. Ahora estamos en el punto en el que están al borde de lo desechable, al menos desde una perspectiva comercial o de investigación: por un poco más de 200 dólares, puedes comprar un pequeño dron de 27 gramos, de código abierto, y todo lo que tienes que hacer es enseñarle a volar. Sin embargo, ahí es donde las cosas se vuelven un poco más desafiantes, porque enseñar a volar a los drones no es un proceso sencillo. Gracias a una buena simulación y a técnicas como el aprendizaje por refuerzo, es mucho más fácil dotar de autonomía a los drones que antes. Pero no suele ser un proceso rápido y puede resultar complicado realizar una transición fluida de la simulación a la realidad. El Laboratorio de Percepción y Robótica Ágil de la Universidad de Nueva York ha logrado agilizar y simplificar mucho el proceso de conseguir autonomía básica para trabajar en drones: el sistema del laboratorio es capaz de entrenar un dron en simulación desde cero hasta un vuelo estable y controlable. 18 segundos planos en una MacBook Pro. Y, en realidad, lleva más tiempo compilar y actualizar el firmware en el dron que todo el proceso de entrenamiento. ARPL NYU Entonces, el dron no solo es capaz de mantener un vuelo estacionario estable mientras rechaza golpes, empujones y viento, sino que también es capaz de volar trayectorias específicas. Nada mal durante 18 segundos, ¿verdad? Una de las cosas que normalmente ralentiza los tiempos de entrenamiento es la necesidad de seguir refinando exactamente para qué estás entrenando, sin refinarlo tanto que solo estés entrenando tu sistema para volar en tu simulación específica en lugar del mundo real. La estrategia utilizada aquí es lo que los investigadores llaman un plan de estudios (también se puede considerar como una especie de plan de lección) para ajustar la función de recompensa utilizada para entrenar el sistema mediante el aprendizaje por refuerzo. El plan de estudios comienza siendo más indulgente y aumenta gradualmente las sanciones para enfatizar la solidez y la confiabilidad. Se trata de eficiencia: hacer el entrenamiento que necesitas hacer de la manera que debe hacerse para obtener los resultados que deseas, y nada más. Hay otros trucos más sencillos que también optimizan esta técnica para aumentar la velocidad. Los algoritmos de aprendizaje por refuerzo profundo son particularmente eficientes y aprovechan la aceleración de hardware que viene con los procesadores de la serie M de Apple. La eficiencia del simulador multiplica los beneficios de la eficiencia de muestra impulsada por el plan de estudios del proceso de aprendizaje por refuerzo, lo que lleva a ese tiempo de capacitación increíblemente rápido. Este enfoque no se limita a simples drones diminutos: funcionará en prácticamente cualquier drone, incluidos los más grandes y caros, o incluso uno que usted mismo construya desde cero. Jonas Eschmann En el vídeo de arriba se nos dice que se necesitaron minutos en lugar de segundos para entrenar una política para el dron, aunque los investigadores esperan que se puedan lograr 18 segundos incluso para un dron más complejo como este en un futuro cercano. Y todo es de código abierto, por lo que, de hecho, puedes construir un dron y enseñarle a volar con este sistema. Pero si espera un poco, las cosas solo mejorarán: los investigadores nos dicen que están trabajando en la integración con el piloto automático del dron de código abierto PX4. A más largo plazo, la idea es tener una política única que pueda adaptarse a diferentes condiciones ambientales, así como a diferentes configuraciones de vehículos, lo que significa que podría funcionar con todo tipo de robots voladores en lugar de solo cuadrotores. Todo lo que necesita para ejecutar esto usted mismo está disponible en GitHub, y el documento está en ArXiv aquí. Desde su sitio Artículos Artículos relacionados en la Web